Analysis of the Flow in a Typified USBR II Stilling Basin through a Numerical and Physical Modeling Approach

 , , and
, , and
Abstract
:1. Introduction
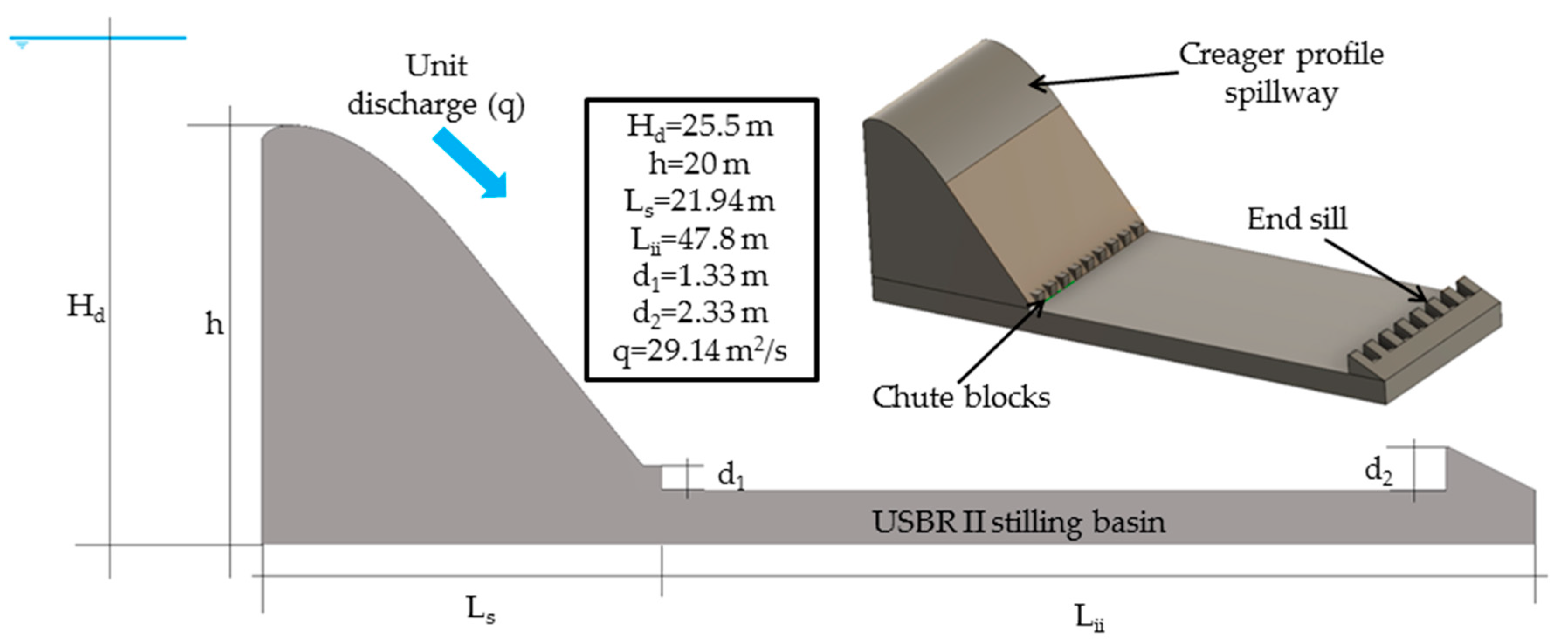
2. Materials and Methods
2.1. Numerical Model
2.1.1. Flow Equations and General Settings
2.1.2. Free Surface Modeling
2.1.3. Turbulence Modeling
2.1.4. Air Entrainment
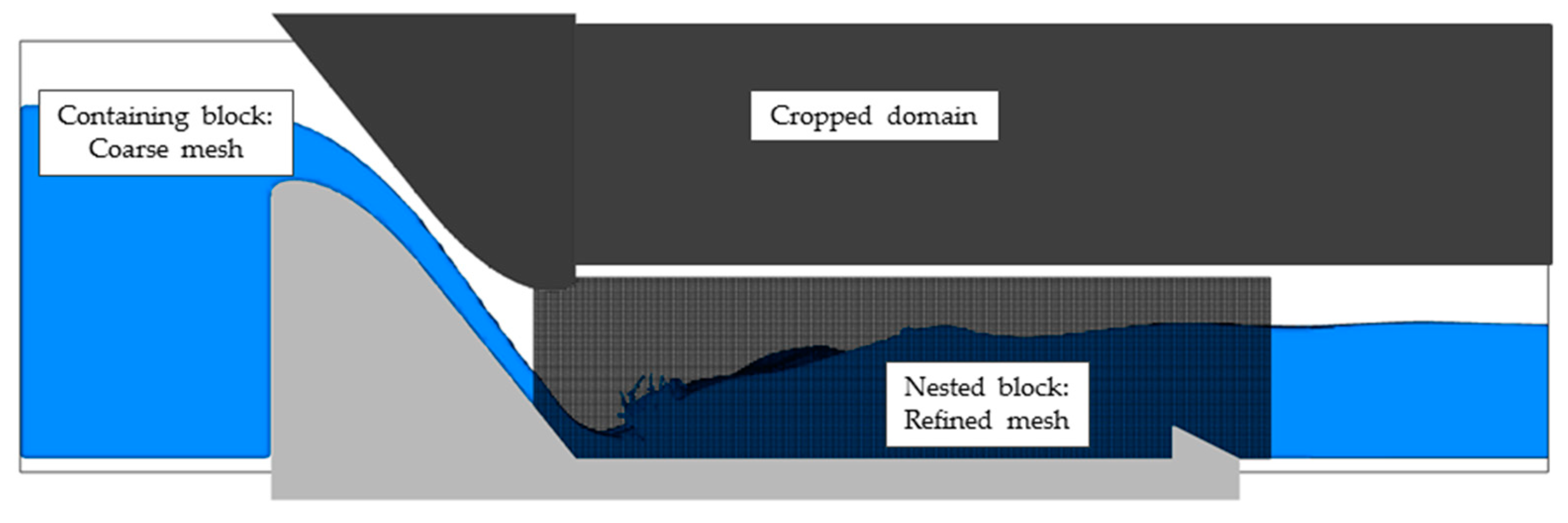
2.1.5. Meshing and Boundary Conditions
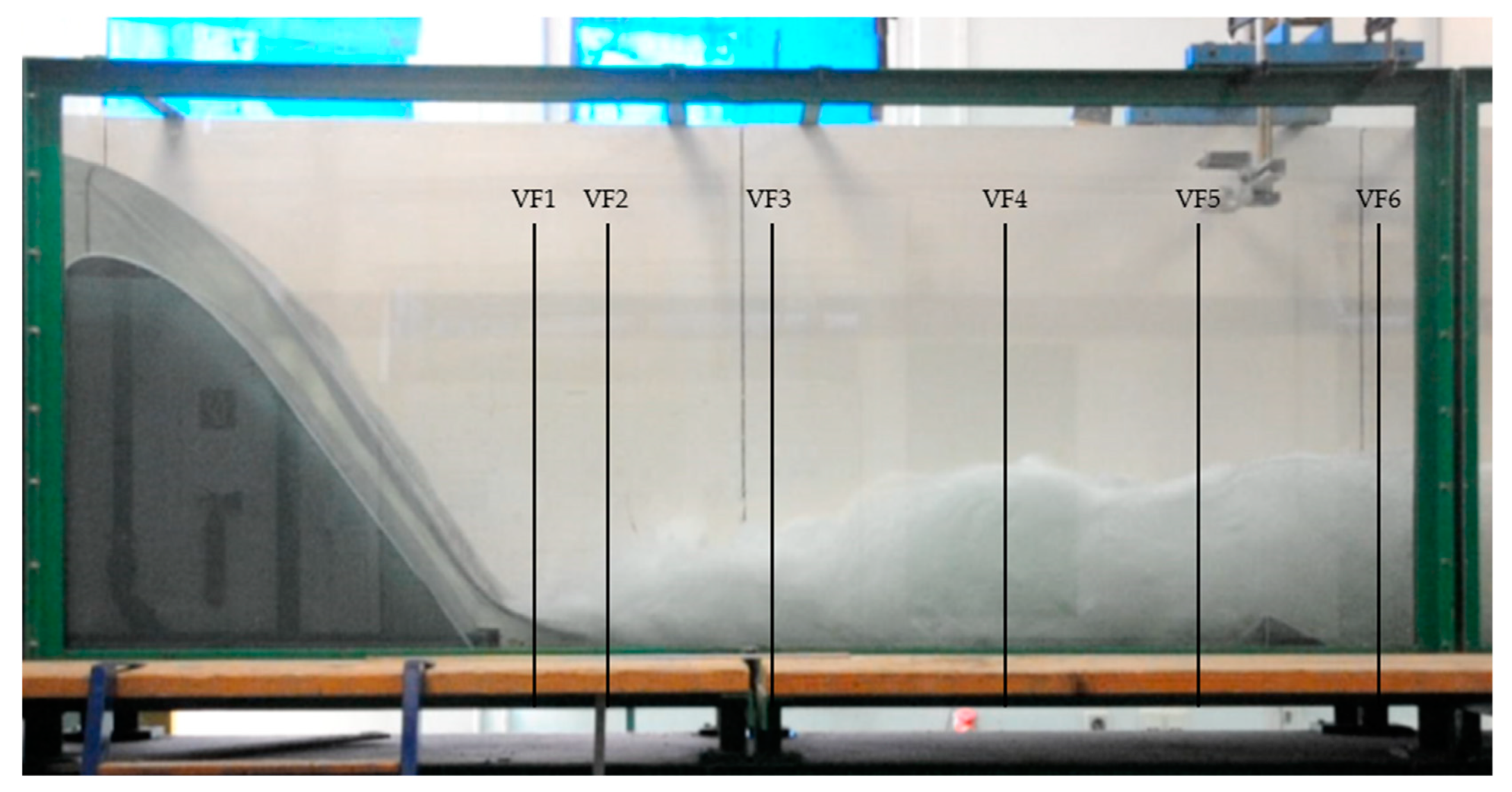
2.2. Physical Model
2.2.1. Digital Image Processing
2.2.2. Turbine Velocity Meter
2.2.3. Pressure Transmitters
2.2.4. Optical Fiber Probe
3. Results and Discussion
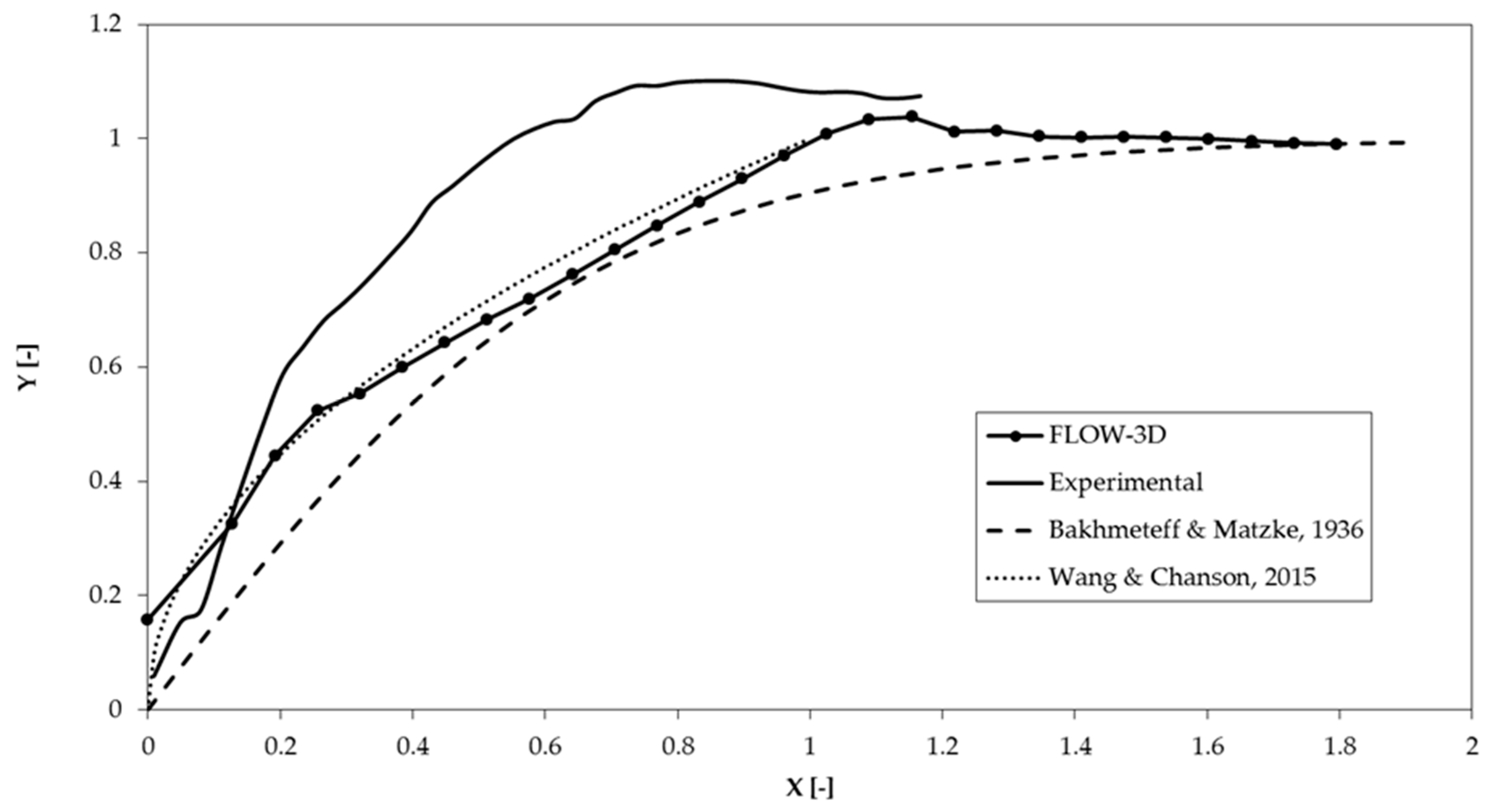
3.1. Free Surface Profile
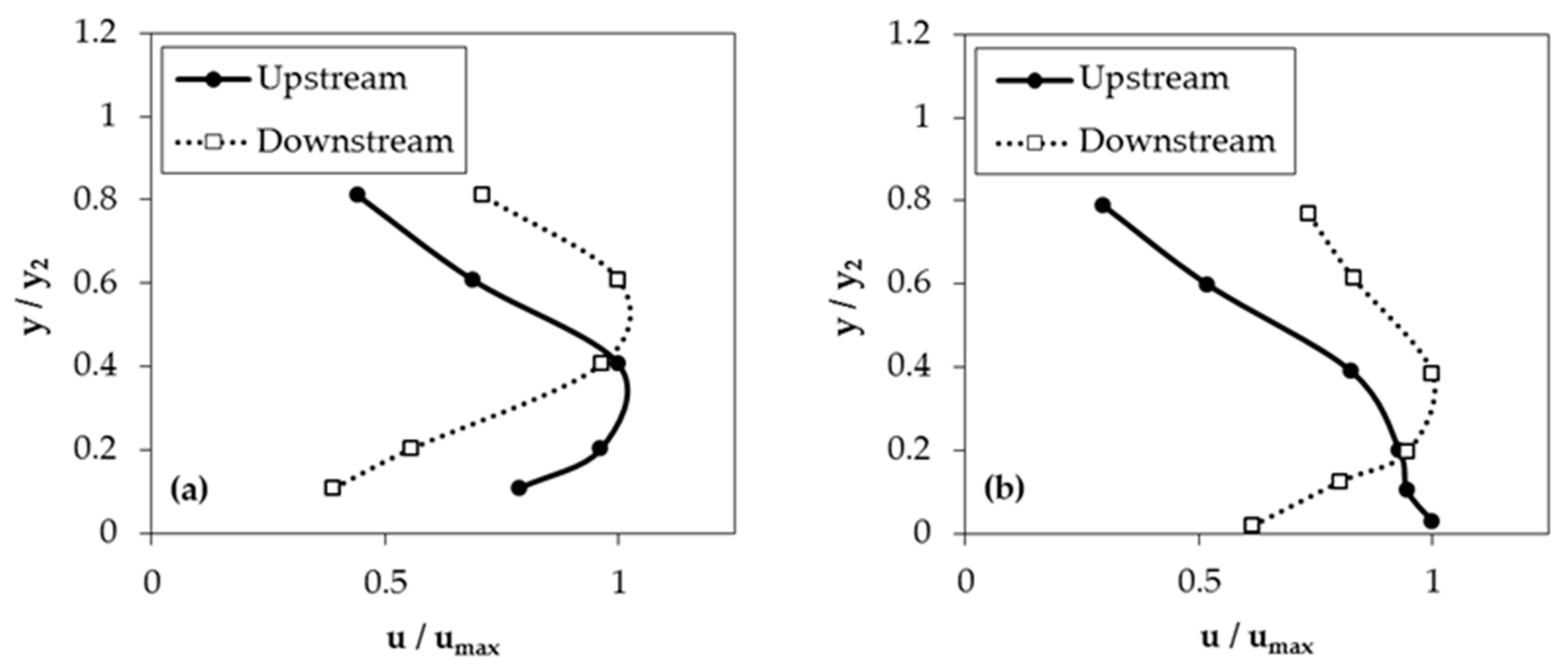
3.2. Velocity Profiles
3.3. Pressure Analysis
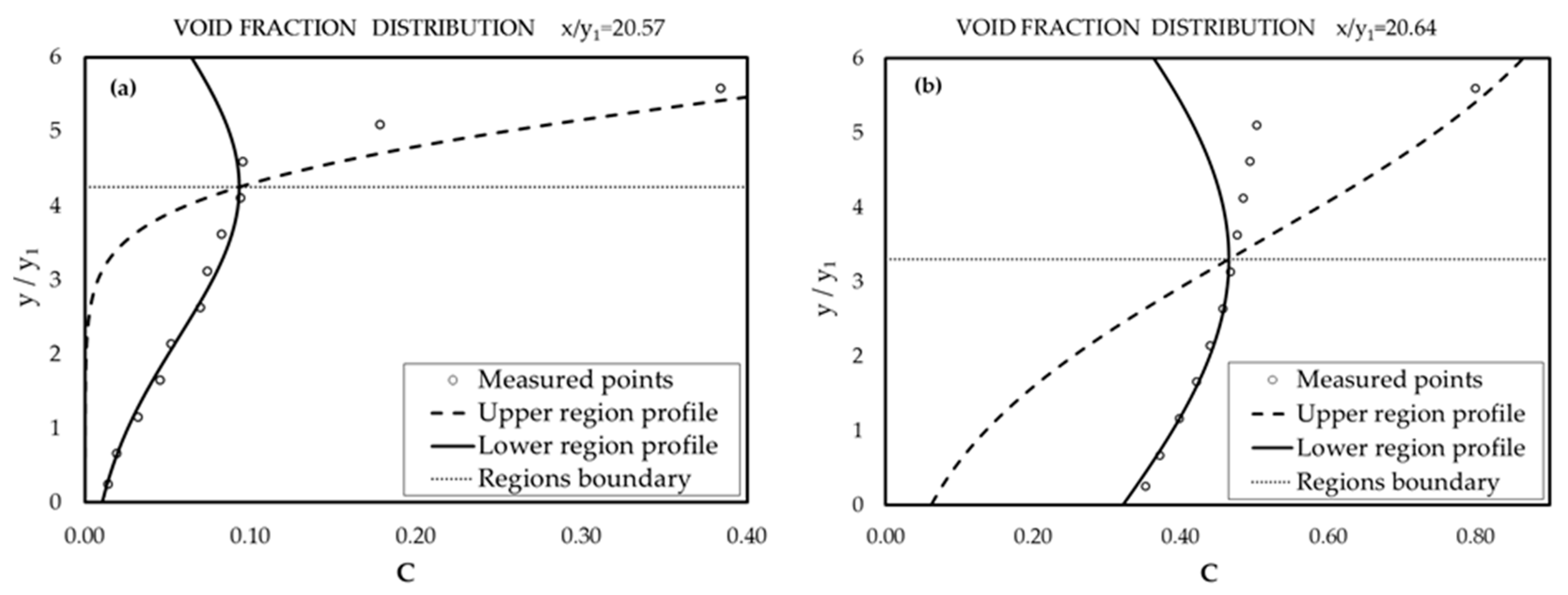
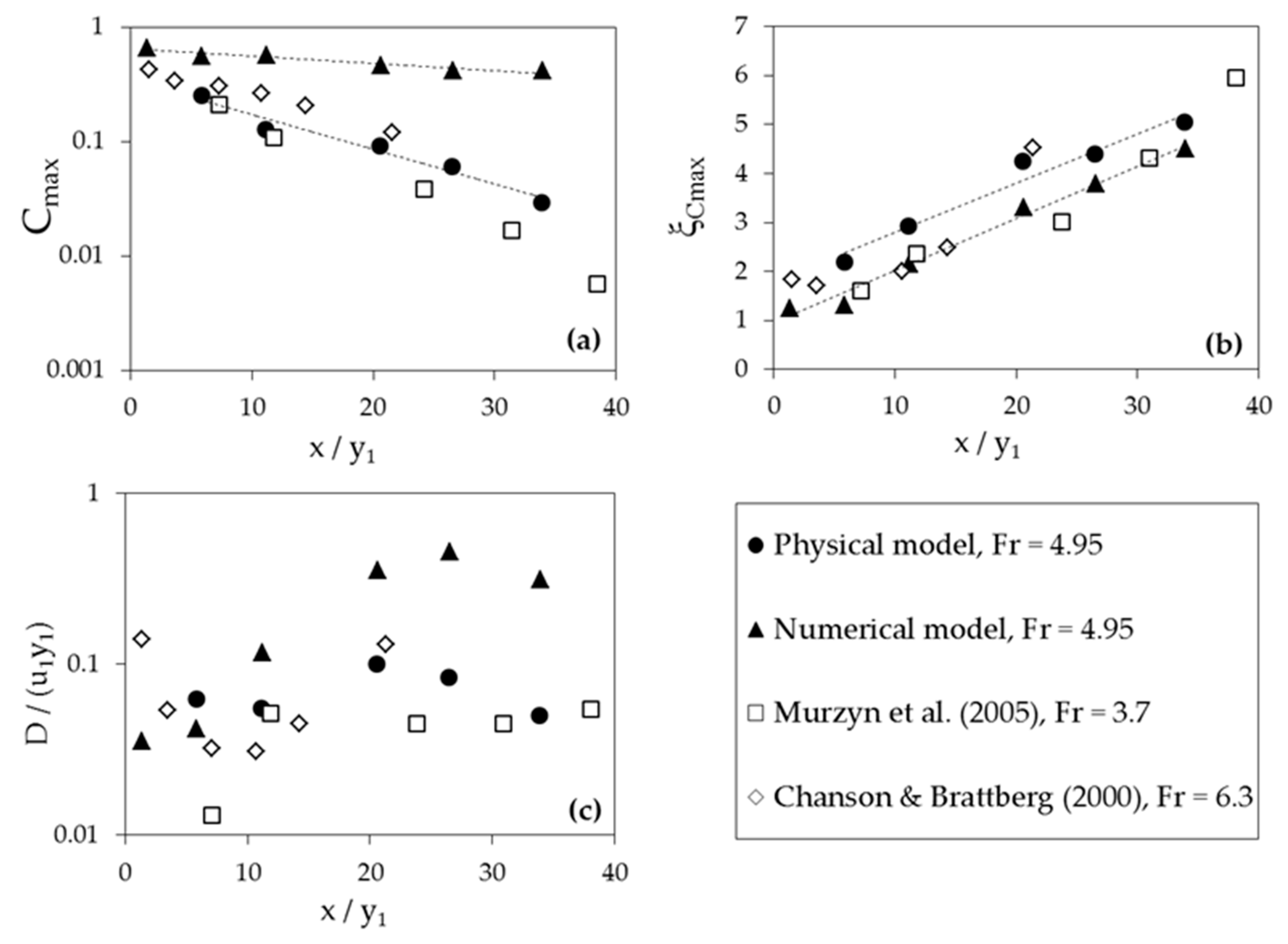
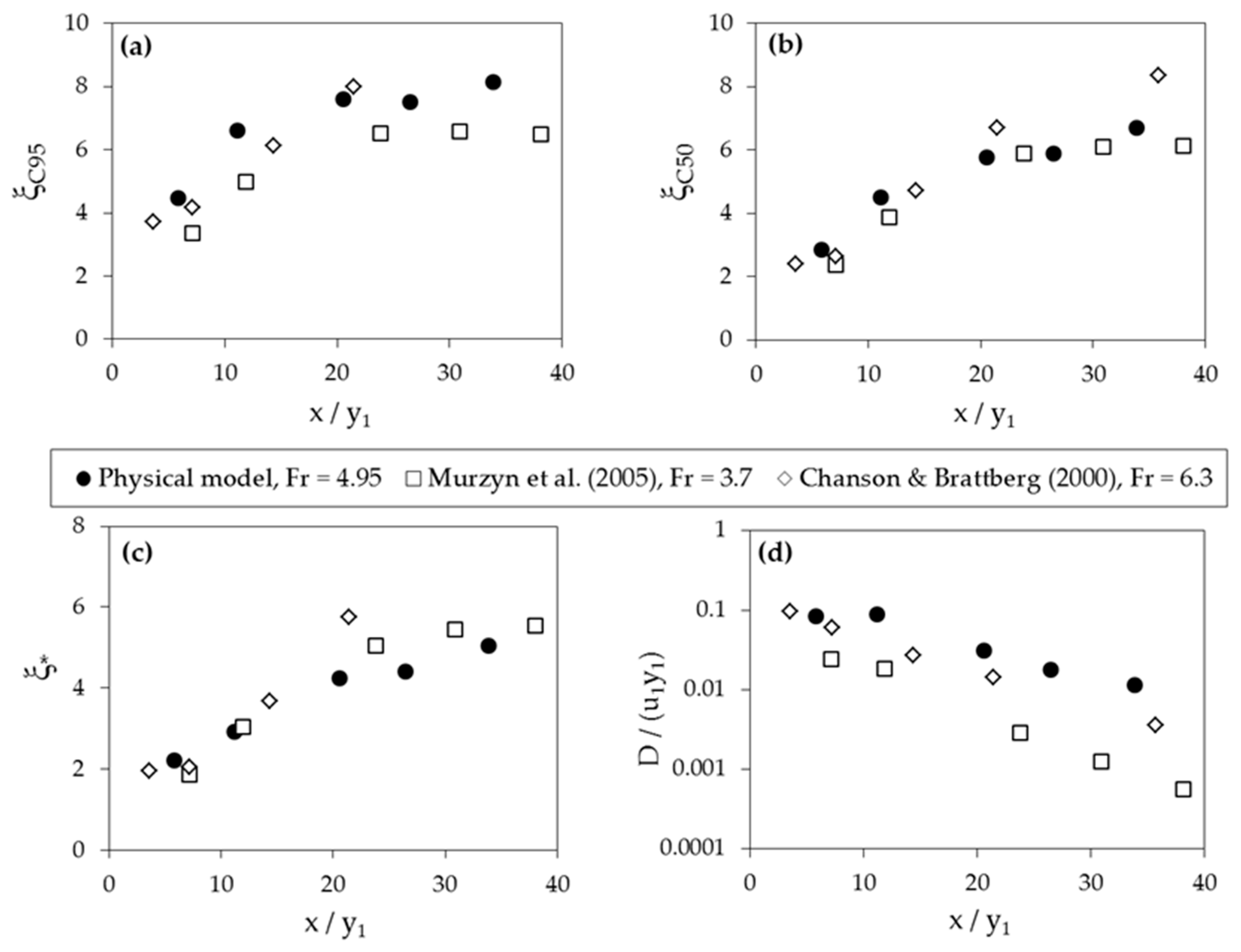
3.4. Void Fraction Distribution
3.4.1. Theoretical Development
3.4.2. Void Fraction Analysis—Case study
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vischer, D.L.; Hager, W.H. Dam Hydraulics; JOHN WILEY SONS: Chichester, UK, 1998. [Google Scholar]
- Falvey, H.T. Cavitation in Chutes and Spillways; United States Bureau of Reclamation: Denver, CO, USA, 1990.
- Bayon, A.; Valero, D.; García-Bartual, R.; Vallés-Morán, F.J.; López-Jiménez, P.A. Performance assessment of OpenFOAM and FLOW-3D in the numerical modeling of a low Reynolds number hydraulic jump. Environ. Model. Softw. 2016, 80, 322–335. [Google Scholar] [CrossRef]
- Chanson, H. Turbulent air–water flows in hydraulic structures: Dynamic similarity and scale effects. Environ. Fluid Mech. 2009, 9, 125–142. [Google Scholar] [CrossRef] [Green Version]
- Heller, V. Scale effects in physical hydraulic engineering models. J. Hydraul. Res. 2011, 49, 293–306. [Google Scholar] [CrossRef]
- Chanson, H. Hydraulics of aerated flows: Qui pro quo? J. Hydraul. Res. 2013, 51, 223–243. [Google Scholar] [CrossRef] [Green Version]
- Blocken, B.; Gualtieri, C. Ten iterative steps for model development and evaluation applied to Computational Fluid Dynamics for Environmental Fluid Mechanics. Environ. Model. Softw. 2012, 33, 1–22. [Google Scholar] [CrossRef]
- Wang, H.; Chanson, H. Experimental Study of Turbulent Fluctuations in Hydraulic Jumps. J. Hydraul. Eng. 2015, 141, 04015010. [Google Scholar] [CrossRef] [Green Version]
- Macián-Pérez, J.F.; García-Bartual, R.; Huber, B.; Bayón, A.; Vallés-Morán, F.J. Approach to the void fraction distribution within a hydraulic jump in a typified USBR II stilling basin. In Proceedings of the 38th IAHR World Congress, Panama City, Panama, 1–6 September 2019. [Google Scholar]
- Valero, D.; Viti, N.; Gualtieri, C. Numerical Simulation of Hydraulic Jumps. Part 1: Experimental Data for Modelling Performance Assessment. Water 2019, 11, 36. [Google Scholar] [CrossRef] [Green Version]
- Viti, N.; Valero, D.; Gualtieri, C. Numerical Simulation of Hydraulic Jumps. Part 2: Recent Results and Future Outlook. Water 2019, 11, 28. [Google Scholar] [CrossRef] [Green Version]
- Bayon, A.; Lopez-Jimenez, P.A. Numerical analysis of hydraulic jumps using OpenFOAM. J. Hydroinform. 2015, 17, 662–678. [Google Scholar] [CrossRef] [Green Version]
- Teuber, K.; Broecker, T.; Bayon, A.; Nützmann, G.; Hinkelmann, R. CFD-modelling of free surface flows in closed conduits. Prog. Comput. Fluid Dyn. Int. J. 2019, 19, 368–380. [Google Scholar] [CrossRef]
- Chachereau, Y.; Chanson, H. Free-surface fluctuations and turbulence in hydraulic jumps. Exp. Therm. Fluid Sci. 2011, 35, 896–909. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Wang, H.; Chanson, H. Turbulence and aeration in hydraulic jumps: Free-surface fluctuation and integral turbulent scale measurements. Environ. Fluid Mech. 2013, 13, 189–204. [Google Scholar] [CrossRef]
- Mossa, M. On the oscillating characteristics of hydraulic jumps. J. Hydraul. Res. 1999, 37, 541–558. [Google Scholar] [CrossRef]
- Chanson, H.; Brattberg, T. Experimental study of the air-water shear flow in a hydraulic jump. Int. J. Multiph. Flow 2000, 26, 583–607. [Google Scholar] [CrossRef] [Green Version]
- Murzyn, F.; Mouaze, D.; Chaplin, J.R. Optical fibre probe measurements of bubbly flow in hydraulic jumps. Int. J. Multiph. Flow 2005, 31, 141–154. [Google Scholar] [CrossRef]
- Gualtieri, C.; Chanson, H. Experimental analysis of Froude number effect on air entrainment in the hydraulic jump. Environ. Fluid Mech. 2007, 7, 217–238. [Google Scholar] [CrossRef] [Green Version]
- Chanson, H.; Gualtieri, C. Similitude and scale effects of air entrainment in hydraulic jumps. J. Hydraul. Res. 2008, 46, 35–44. [Google Scholar] [CrossRef] [Green Version]
- Ho, D.K.H.; Riddette, K.M. Application of computational fluid dynamics to evaluate hydraulic performance of spillways in Australia. Aust. J. Civ. Eng. 2010, 6, 81–104. [Google Scholar] [CrossRef]
- Sarfaraz, M.; Attari, J. Numerical Simulation of Uniform Flow Region over a Steeply Sloping Stepped Spillway. In Proceedings of the 6th National Congress on Civil Engineering, Semnan, Iran, 26 April 2011. [Google Scholar]
- Dong, Z.; Wang, J.; Vetsch, D.F.; Boes, R.M.; Tan, G. Numerical Simulation of Air-Water Two-Phase Flow on Stepped Spillways behind X-Shaped Flaring Gate Piers under Very High Unit Discharge. Water 2019, 11, 1956. [Google Scholar] [CrossRef] [Green Version]
- Şentürk, F. Hydraulics of Dams and Reservoirs; Water Resources Publication: Littleton, CO, USA, 1994. [Google Scholar]
- United States Bureau of Reclamation. Design of Small Dams; US Department of the Interior, Bureau of Reclamation: Washington, DC, USA, 1987.
- Thompson, A.C. Basic Hydrodynamics; Butterworth-Heinemann: Oxford, UK, 1987. [Google Scholar]
- Peterka, A.J. Hydraulic Design of Stilling Basins and Energy Dissipators; Department of the Interior, Bureau of Reclamation: Washington, DC, USA, 1978.
- Toso, J.W.; Bowers, C.E. Extreme pressures in hydraulic-jump stilling basins. J. Hydraul. Eng. 1988, 114, 829–843. [Google Scholar] [CrossRef]
- Houichi, L.; Ibrahim, G.; Achour, B. Experiments for the discharge capacity of the siphon spillway having the Creager-Ofitserov profile. Int. J. Fluid Mech. Res. 2006, 33, 395–406. [Google Scholar] [CrossRef]
- Padulano, R.; Fecarotta, O.; Del Giudice, G.; Carravetta, A. Hydraulic design of a USBR Type II stilling basin. J. Irrig. Drain. Eng. 2017, 143, 04017001. [Google Scholar] [CrossRef] [Green Version]
- Flow Science Inc. Flow-3D User Manual; Flow Science Inc.: Santa Fe, NM, USA, 2017. [Google Scholar]
- McDonald, P.W. The computation of transonic flow through two-dimensional gas turbine cascades. In Proceedings of the ASME 1971 International Gas Turbine Conference and Products Show, Houston, TX, USA, 28 March–1 April 1971. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Bombardelli, F.; Meireles, I.; Matos, J. Laboratory measurements and multi-block numerical simulations of the mean flow and turbulence in the non-aerated skimming flow region of steep stepped spillways. Environ. Fluid Mech. 2011, 11, 263–288. [Google Scholar] [CrossRef] [Green Version]
- Pope, S.B. Turbulent Flows. Meas. Sci. Technol. 2001, 12, 2020–2021. [Google Scholar] [CrossRef]
- Harlow, F.H.; Nakayama, P.I. Turbulence transport equations. Phys. Fluids 1967, 10, 2323–2332. [Google Scholar] [CrossRef]
- Launder, B.E.; Sharma, B.I. Application of the energy-dissipation model of turbulence to the calculation of flow near a spinning disc. Lett. Heat Mass Transf. 1974, 1, 131–137. [Google Scholar] [CrossRef]
- Rodi, W. Turbulence Models and Their Application in Hydraulics; Routledge: London, UK, 2017. [Google Scholar]
- Yakhot, V.; Orszag, S.A.; Thangam, S.; Gatski, T.B.; Speziale, C.G. Development of turbulence models for shear flows by a double expansion technique. Phys. Fluids A Fluid Dyn. 1992, 4, 1510–1520. [Google Scholar] [CrossRef] [Green Version]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 1998. [Google Scholar]
- Macián-Pérez, J.F.; Huber, B.; Bayón, A.; García-Bartual, R.; Vallés-Morán, F.J. Influencia de la elección del modelo de turbulencia en el análisis numérico CFD de un cuenco amortiguador tipificado USBR II. In Proceedings of the VI Jorandas de Ingeniería del Agua, Toledo, Spain, 22–25 October 2019. [Google Scholar]
- Li, S.; Zhang, J. Numerical Investigation on the Hydraulic Properties of the Skimming Flow over Pooled Stepped Spillway. Water 2018, 10, 1478. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Wang, J.; Zhou, C.; Dong, Z.; Zhou, Z. Numerical simulation of hydraulic characteristics in a vortex drop shaft. Water 2018, 10, 1393. [Google Scholar] [CrossRef] [Green Version]
- Falvey, H.T. Air-Water Flow in Hydraulic Structures; NASA STI/Recon Technical Report No. 41; United States Department of Interior: Denver, CO, USA, 1980; Volume 81.
- Xiang, M.; Cheung, S.C.P.; Tu, J.Y.; Zhang, W.H. A multi-fluid modelling approach for the air entrainment and internal bubbly flow region in hydraulic jumps. Ocean Eng. 2014, 91, 51–63. [Google Scholar] [CrossRef]
- Valero, D.; Bung, D.B. Hybrid investigations of air transport processes in moderately sloped stepped spillway flows. In Proceedings of the 36th IAHR World Congress, The Hague, The Netherlands, 28 June–3 July 2015. [Google Scholar]
- Richardson, J.F.; Zaki, W.N. Sedimentation and fluidization. Trans. Inst. Chem. Eng. 1954, 32, 35. [Google Scholar]
- Celik, I.B.; Ghia, U.; Roache, P.J.; Freitas, C.J. Procedure for estimation and reporting of uncertainty due to discretization in CFD applications. J. Fluids Eng. ASME 2008, 130, 078001. [Google Scholar]
- Cartellier, A.; Achard, J.L. Local phase detection probes in fluid/fluid two-phase flows. Rev. Sci. Instrum. 1991, 62, 279–303. [Google Scholar] [CrossRef]
- Cartellier, A.; Barrau, E. Monofiber optical probes for gas detection and gas velocity measurements: Conical probes. Int. J. Multiph. Flow 1998, 24, 1265–1294. [Google Scholar] [CrossRef]
- Boyer, C.; Duquenne, A.M.; Wild, G. Measuring techniques in gas–liquid and gas–liquid–solid reactors. Chem. Eng. Sci. 2002, 57, 3185–3215. [Google Scholar] [CrossRef] [Green Version]
- Hager, W.H.; Bremen, R. Classical hydraulic jump: Sequent depths. J. Hydraul. Res. 1989, 27, 565–585. [Google Scholar] [CrossRef]
- Bélanger, J.B. Notes sur l’Hydraulique. Ecole Royale Des Ponts Et Chaussées 1841, 1842, 223. [Google Scholar]
- Hager, W.H.; Li, D. Sill-controlled energy dissipator. J. Hydraul. Res. 1992, 30, 165–181. [Google Scholar] [CrossRef]
- Hager, W.H. Energy Dissipators and Hydraulic Jump; Springer Science & Business Media: Dordrecht, The Netherlands, 1992. [Google Scholar]
- Bakhmeteff, B.A.; Matzke, A.E. The Hydraulic Jump In Terms of Dynamic Similarity. Trans. Am. Soc. Civ. Eng. 1935, 101, 630–647. [Google Scholar]
- Hager, W.H.; Bremen, R.; Kawagoshi, N. Classical hydraulic jump: Length of roller. J. Hydraul. Res. 1990, 28, 591–608. [Google Scholar] [CrossRef]
- Bennett, N.D.; Croke, B.F.W.; Guariso, G.; Guillaume, J.H.A.; Hamilton, S.H.; Jakeman, A.J.; Marsili-Libelli, S.; Newham, L.T.H.; Norton, J.P.; Perrin, C.; et al. Characterising performance of environmental models. Environ. Model. Softw. 2013, 40, 1–20. [Google Scholar] [CrossRef]
- McCorquodale, J.A.; Khalifa, A. Internal flow in hydraulic jumps. J. Hydraul. Eng. 1983, 109, 684–701. [Google Scholar] [CrossRef]
- Kirkgöz, M.S.; Ardiçlioğlu, M. Velocity profiles of developing and developed open channel flow. J. Hydraul. Eng. 1997, 123, 1099–1105. [Google Scholar] [CrossRef]
- Chanson, H. Air Bubble Entrainment in Free-Surface Turbulent Shear Flows; Academic Press: Cambridge, MA, USA, 1996. [Google Scholar]
- Brattberg, T.; Toombes, L.; Chanson, H. Developing air-water shear layers of two-dimensional water jets discharging into air. In Proceedings of the ASME Fluids Engineering Division Summer Meeting, Washington, DC, USA, 21–25 June 1998. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | Nested Block Cell Size | Containing Block Cell Size |
|---|---|---|
| 1 | 0.400 m | 0.800 m |
| 2 | 0.250 m | 0.500 m |
| 3 | 0.180 m | 0.360 m |
| 4 | 0.135 m | 0.270 m |
| Mesh Combination | Model Apparent Order (p) | Grid Convergence Index (GCI) |
|---|---|---|
| 1-2-3 | 2.78 | 6.0% |
| 2-3-4 | 5.13 | 6.4% |
| 1-3-4 | 133.23 | 3.6% |
| 1-2-4 | 2.51 | 13.6% |
| Model | Supercritical Flow Depth (y1) | Subcritical Flow Depth (y2) | Unit Discharge (q) | Inflow Froude Number (Fr1) |
|---|---|---|---|---|
| Numerical model | 1.520 m | 9.500 m | 29.143 m2/s | 4.97 |
| Physical model | 0.061 (1.525) 1 m | 0.370 (9.250) 1 m | 0.233 (29.143) 1 m2/s | 4.93 |
| Model | x/y1 | |||||||
|---|---|---|---|---|---|---|---|---|
| Numerical model | 1.32 | 5.84 | 11.18 | 20.64 | 26.56 | 33.96 | ||
| Physical model | 1.31 | 5.82 | 11.14 | 20.57 | 26.47 | 33.85 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Macián-Pérez, J.F.; García-Bartual, R.; Huber, B.; Bayon, A.; Vallés-Morán, F.J. Analysis of the Flow in a Typified USBR II Stilling Basin through a Numerical and Physical Modeling Approach. Water 2020, 12, 227. https://doi.org/10.3390/w12010227
Macián-Pérez JF, García-Bartual R, Huber B, Bayon A, Vallés-Morán FJ. Analysis of the Flow in a Typified USBR II Stilling Basin through a Numerical and Physical Modeling Approach. Water. 2020; 12(1):227. https://doi.org/10.3390/w12010227
Chicago/Turabian StyleMacián-Pérez, Juan Francisco, Rafael García-Bartual, Boris Huber, Arnau Bayon, and Francisco José Vallés-Morán. 2020. "Analysis of the Flow in a Typified USBR II Stilling Basin through a Numerical and Physical Modeling Approach" Water 12, no. 1: 227. https://doi.org/10.3390/w12010227