Hydrological/Hydraulic Modeling-Based Thresholding of Multi SAR Remote Sensing Data for Flood Monitoring in Regions of the Vietnamese Lower Mekong River Basin

 ,
,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
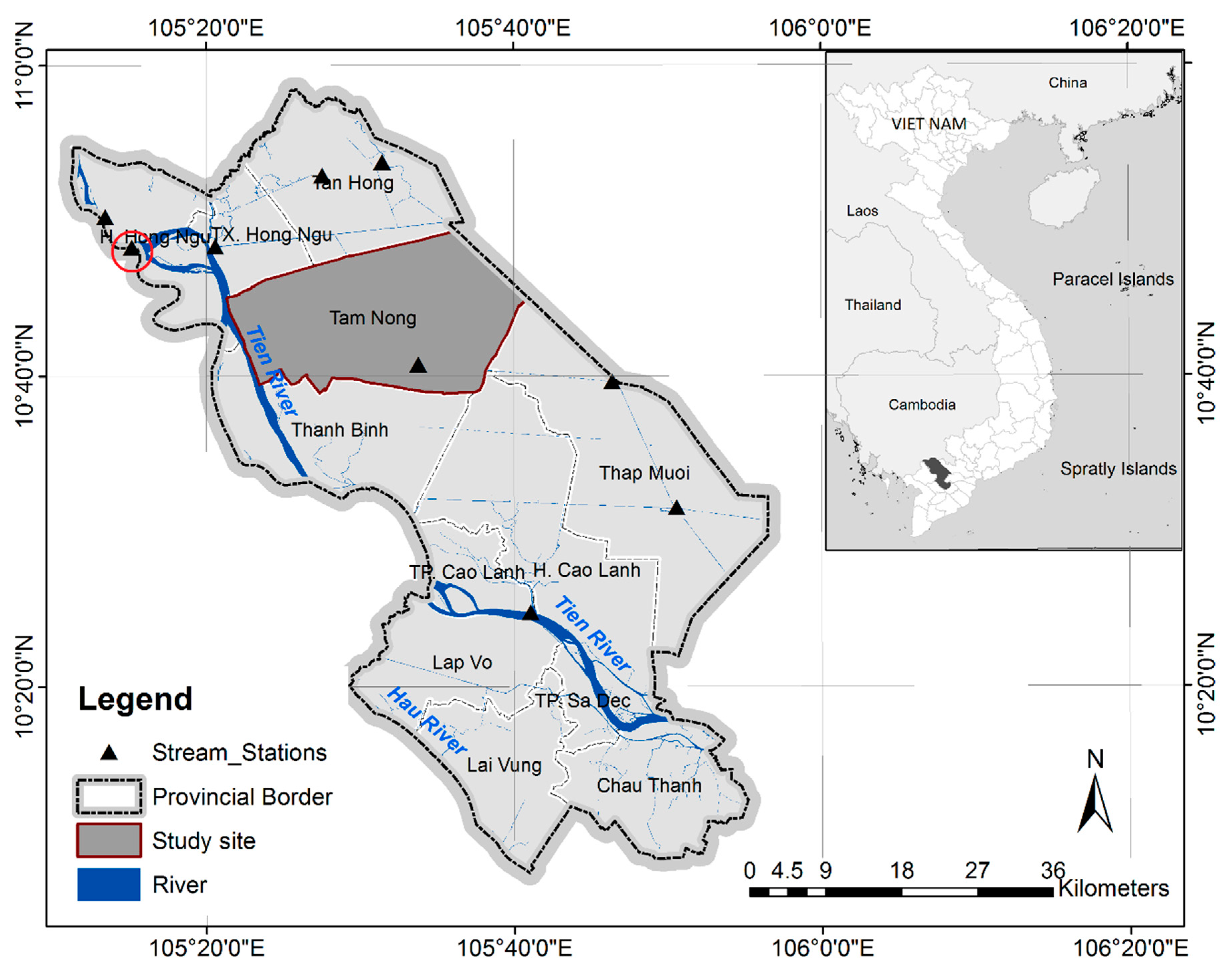
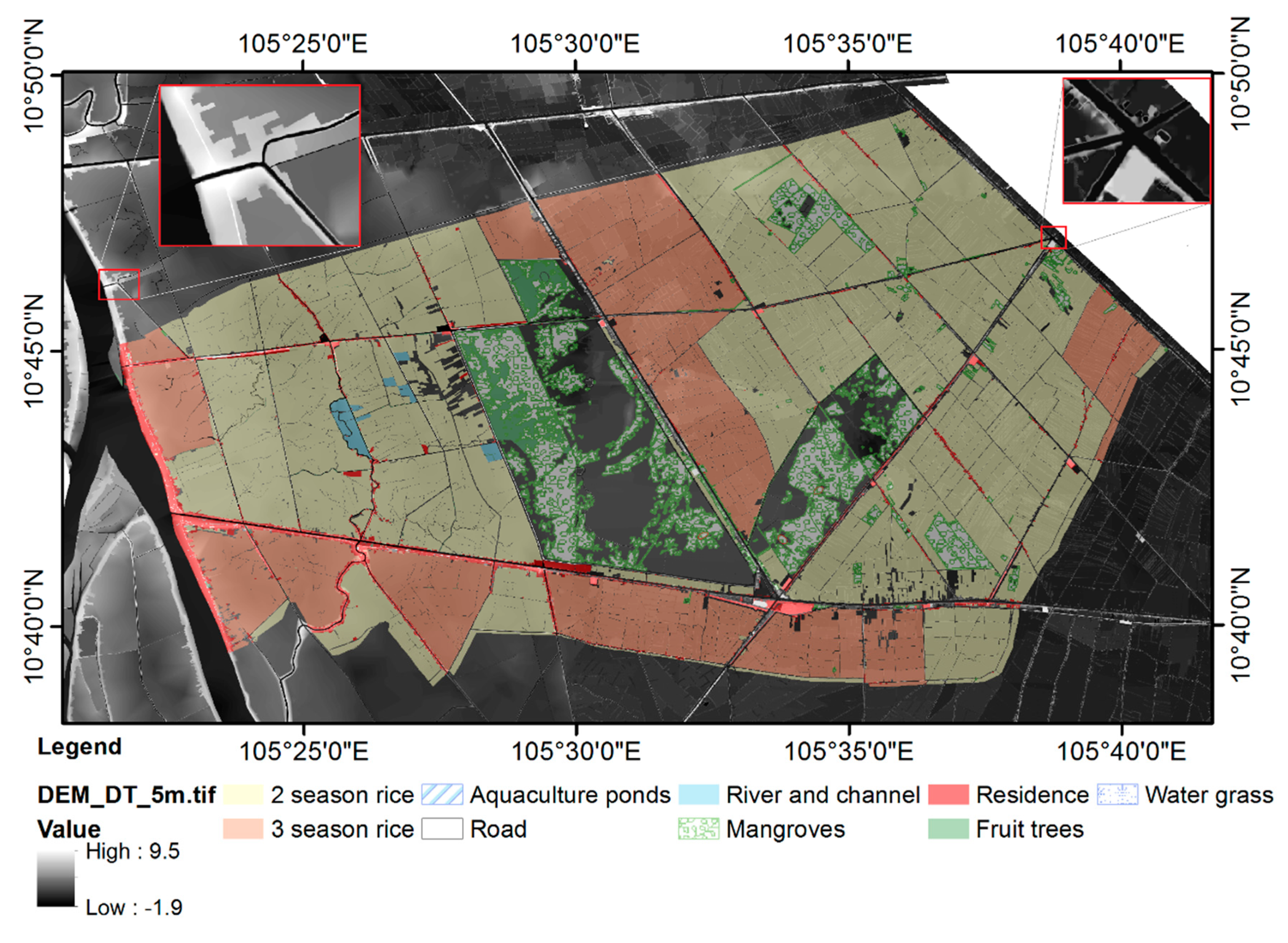
2.1. Study Site
2.2. Methods
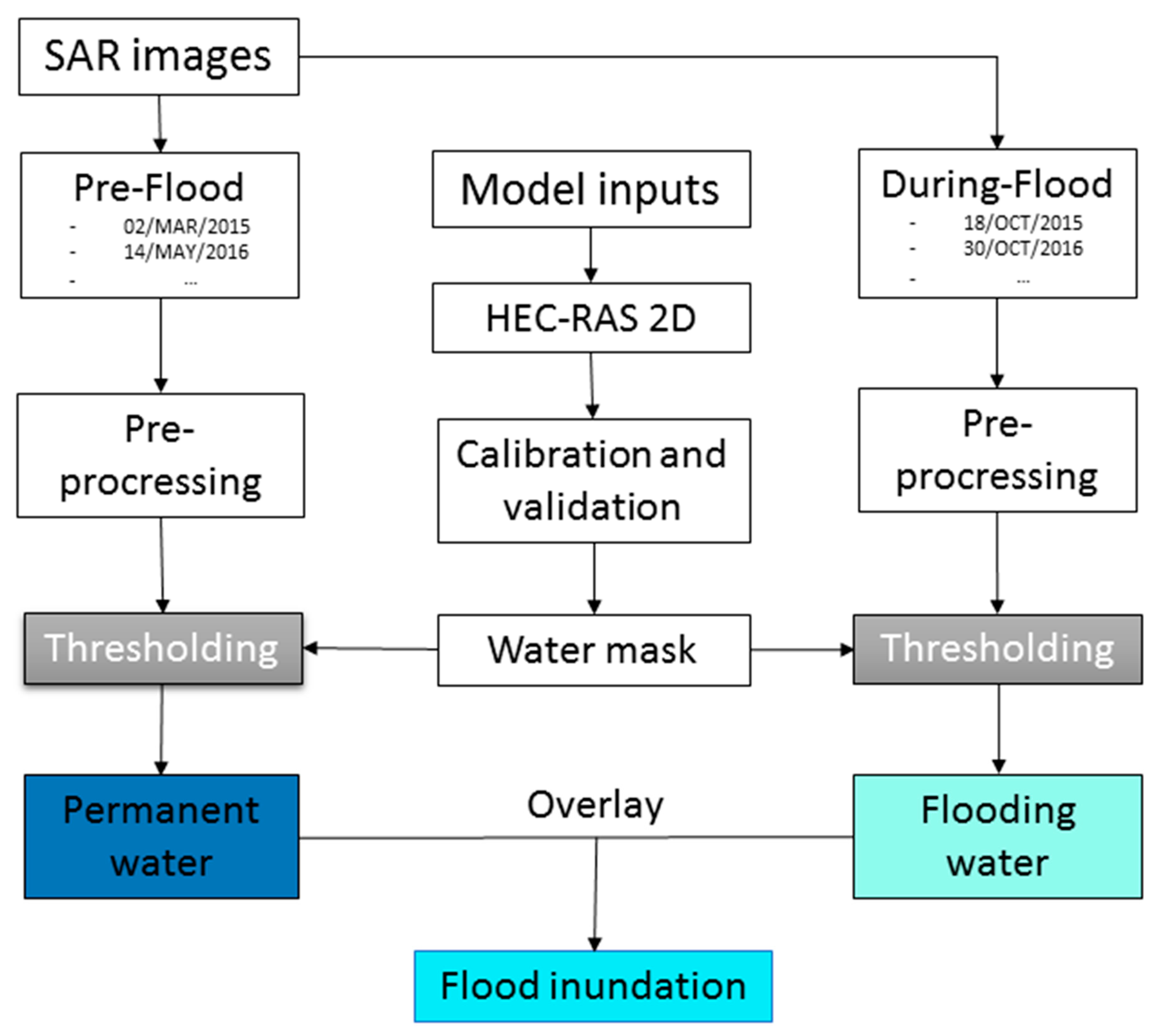
2.2.1. Study Workflow
2.2.2. Inundation Hydraulic Modeling
2.2.3. Scattering, Polarization, and Local Incidence Angle Analyses
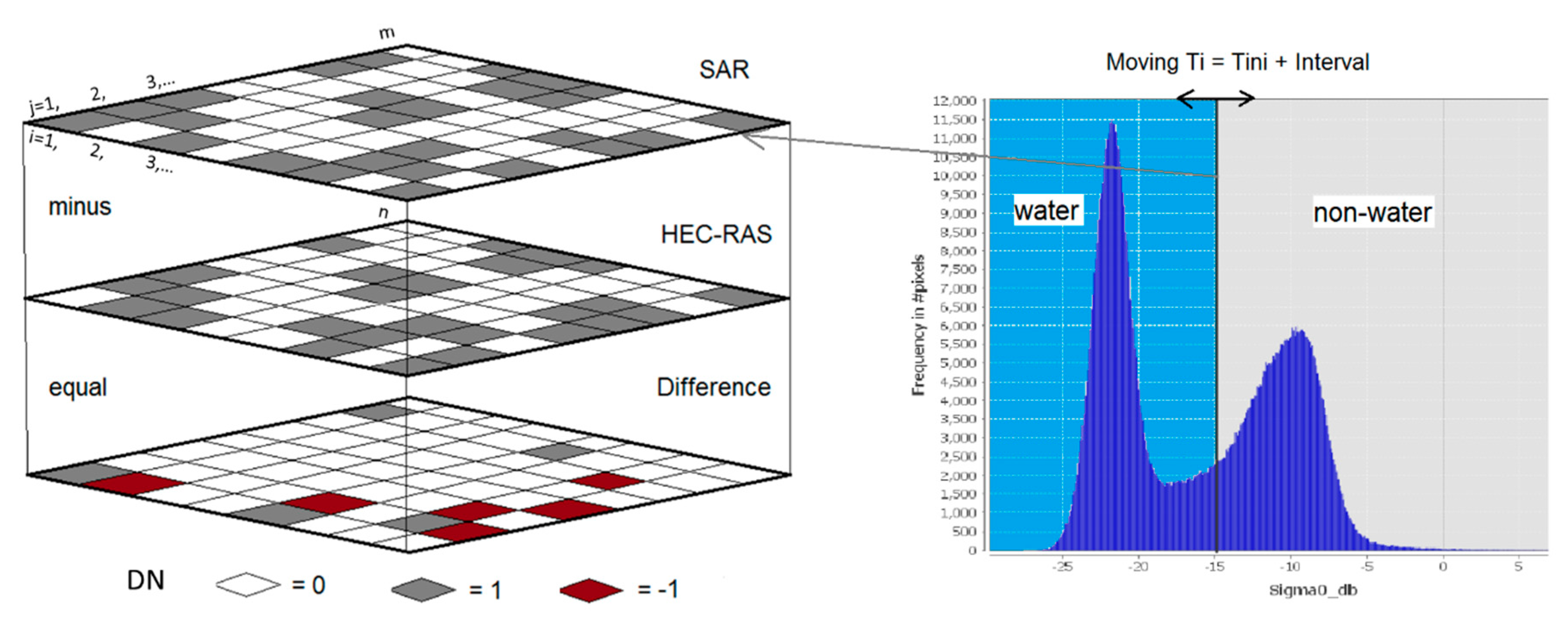
2.2.4. Thresholding
2.2.5. Generating Flood Maps and Evaluation
2.3. Data
2.3.1. Data for the HEC-RAS 2D Model
2.3.2. Remote Sensing Data
3. Results and Discussions
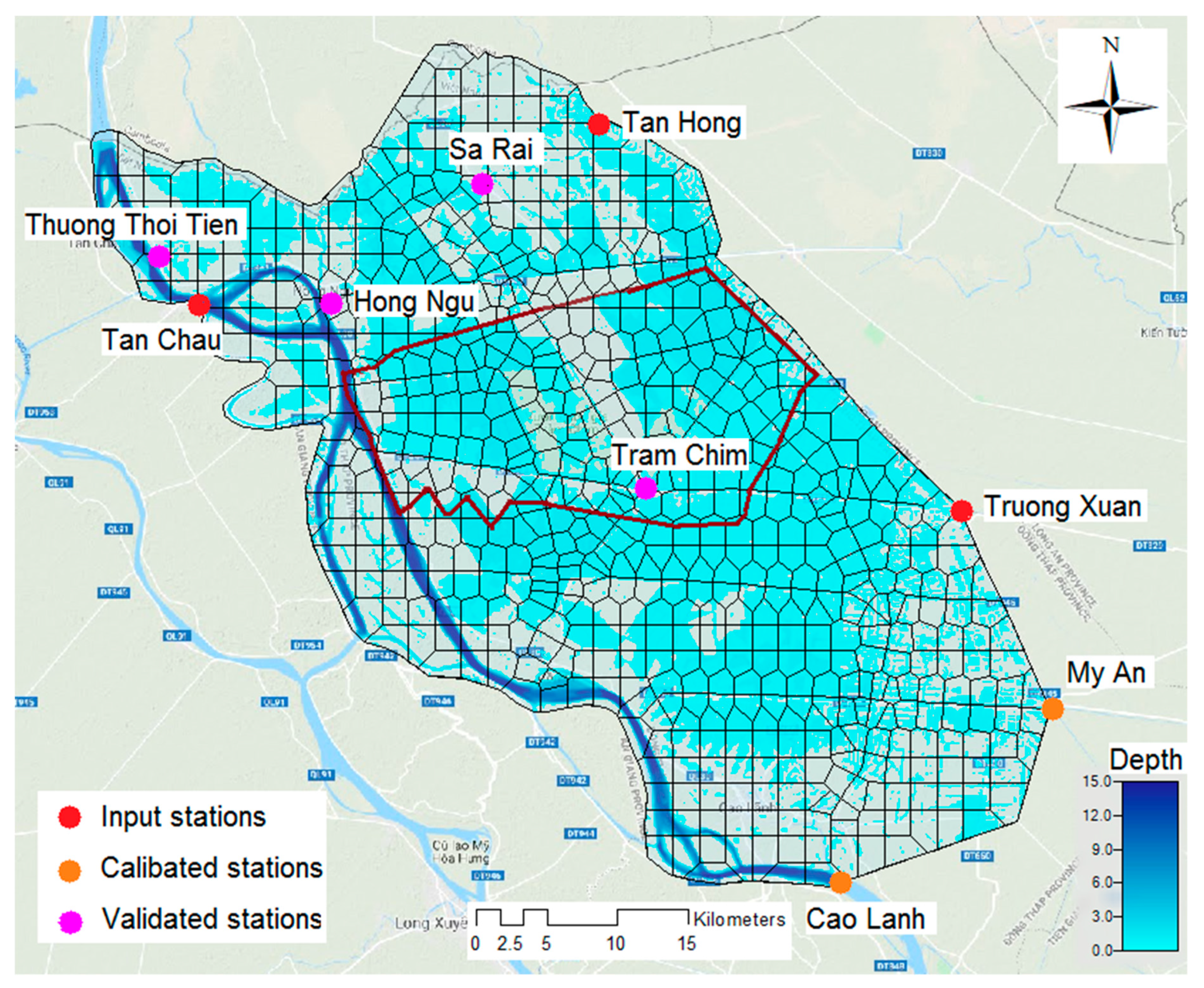
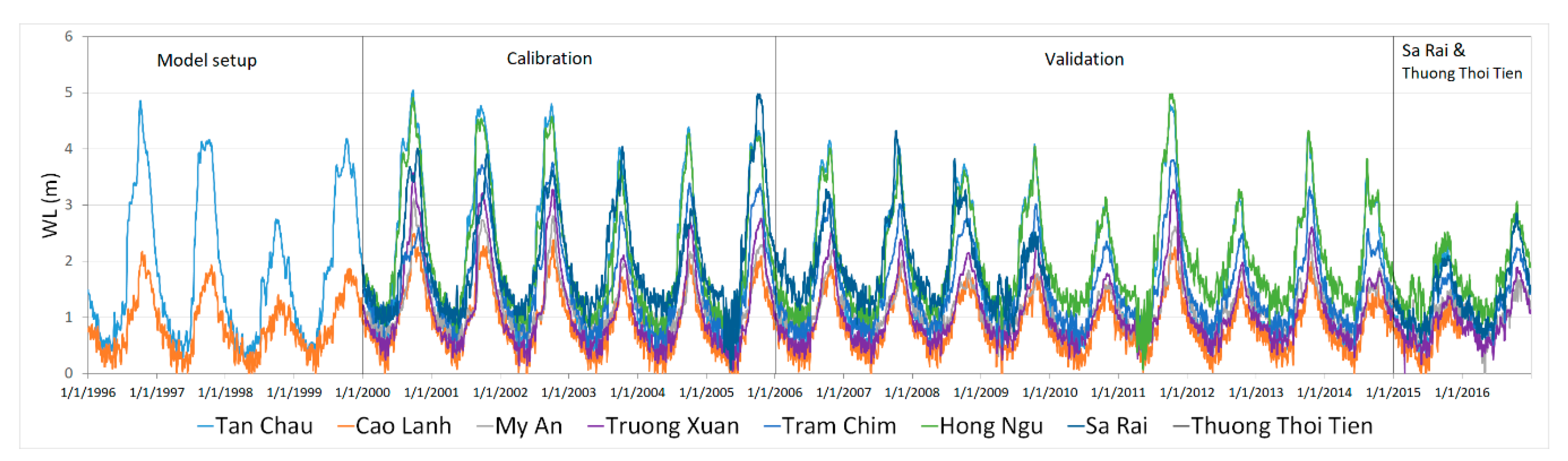
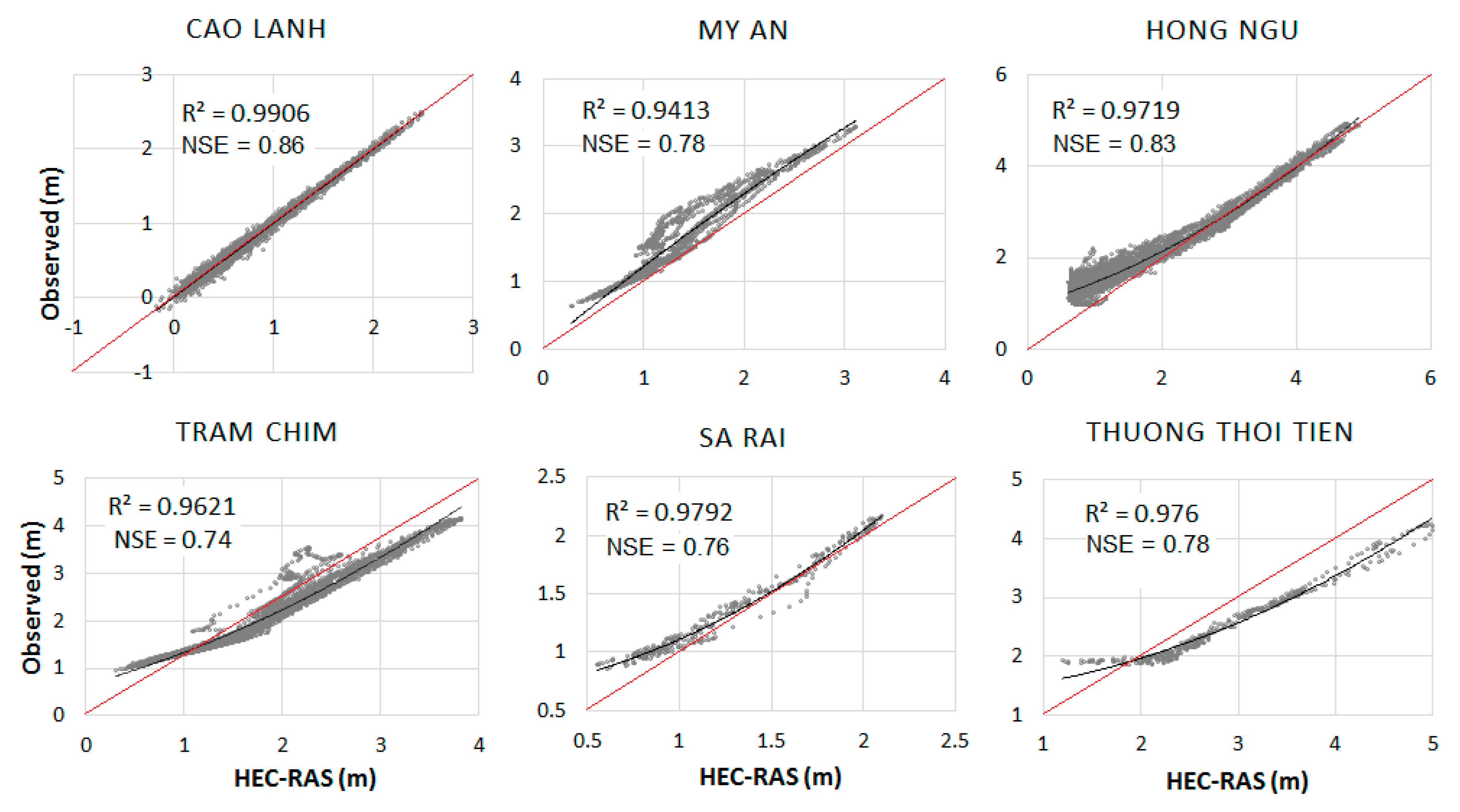
3.1. HEC-RAS 2D Calibration and Validation
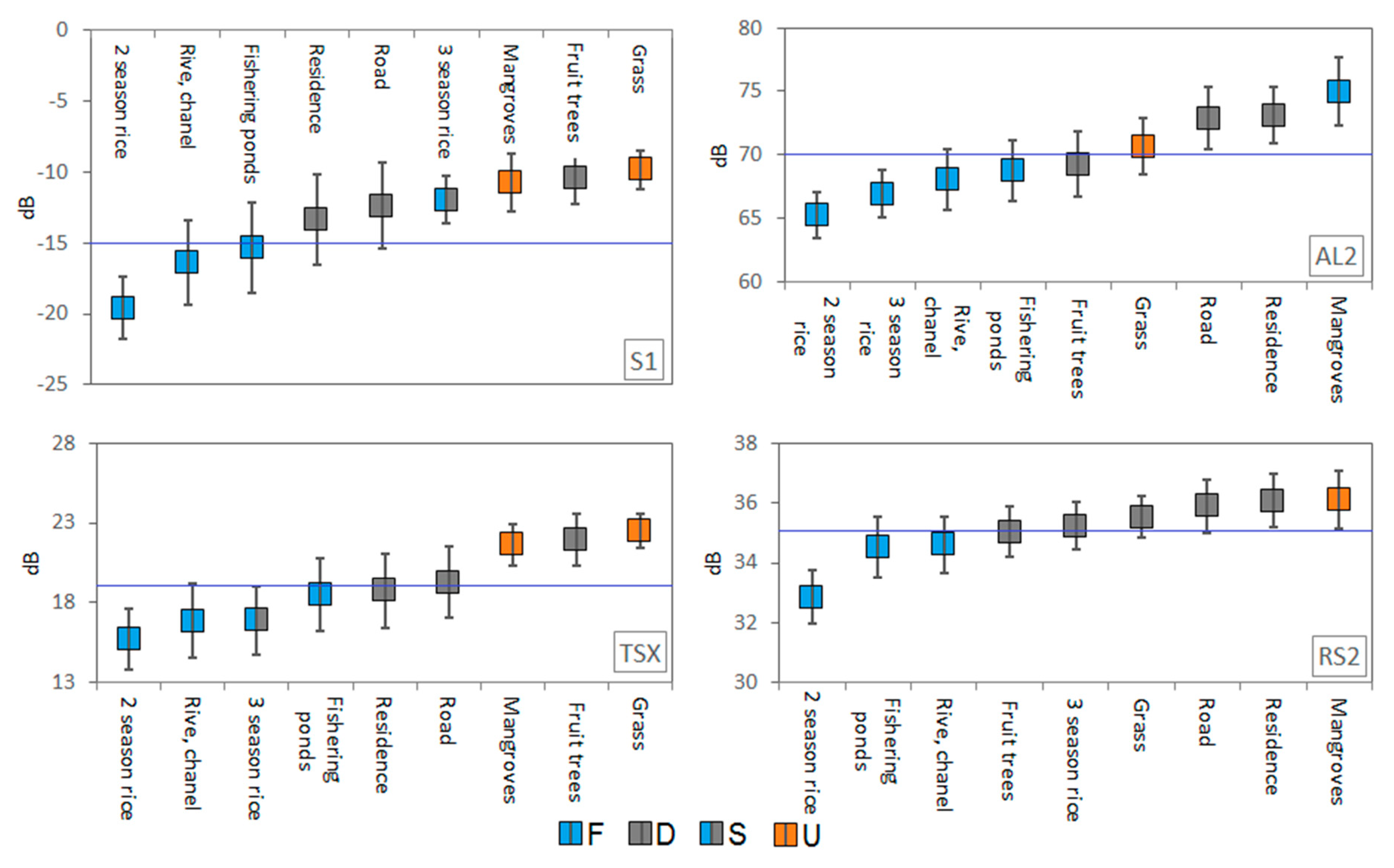
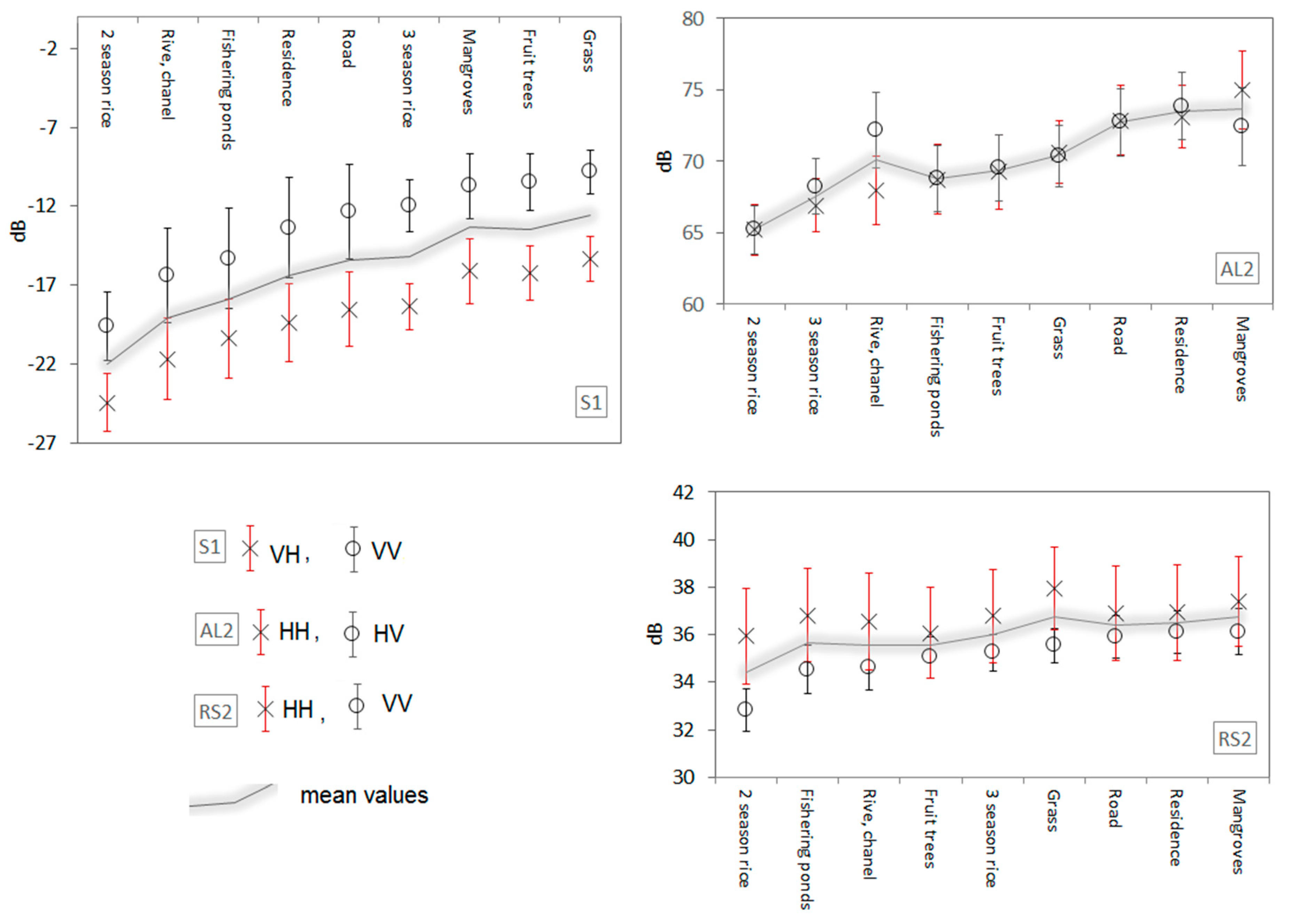
3.2. Scattering Analysis for Pre-HST Thresholding
3.3. Polarization Comparison
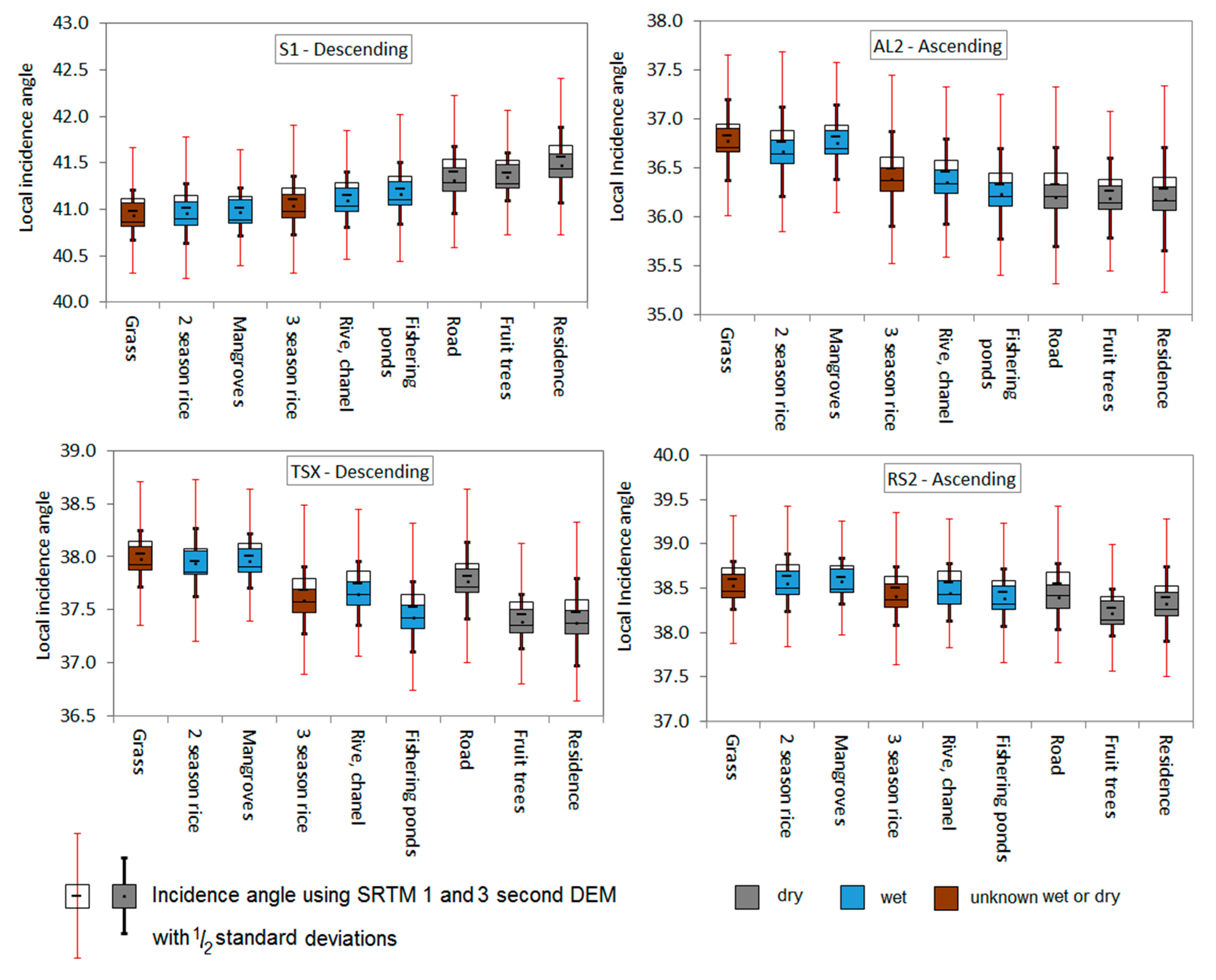
3.4. Local Incidence Angle Effects
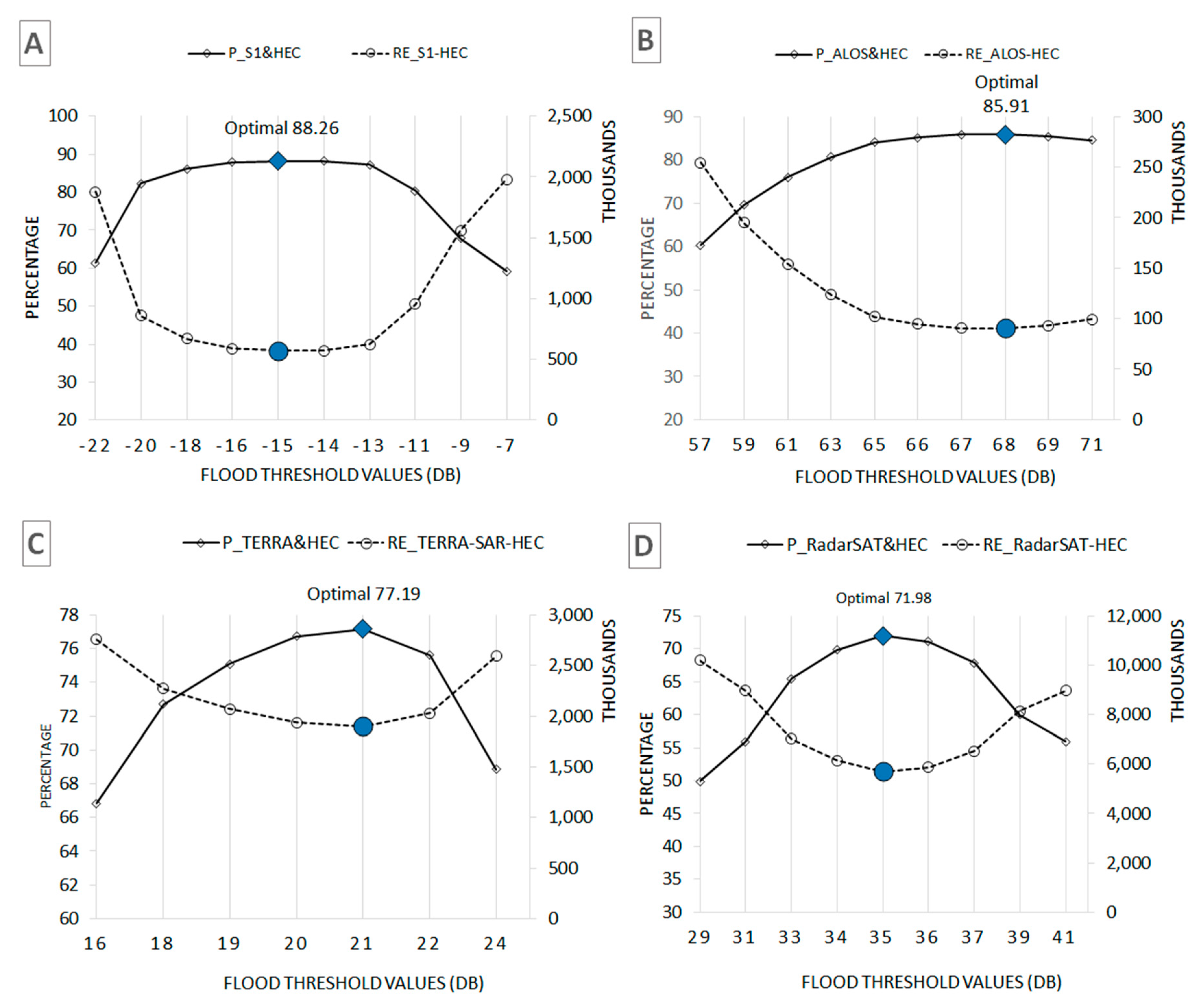
3.5. Graphical HST Optimization
3.6. SAR Flood Maps
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bolanos, S.; Stiff, D.; Brisco, B.; Pietroniro, A. Operational surface water detection and monitoring using Radarsat 2. Remote Sens. 2016, 8, 285. [Google Scholar] [CrossRef] [Green Version]
- Brivio, P.A.; Colombo, R.; Maggi, M.; Tomasoni, R. Integration of remote sensing data and GIS for accurate mapping of flooded areas. Int. J. Remote. Sens. 2002, 23, 429–441. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Mason, D.C.; Giustarini, L.; Garcia-Pintado, J.; Cloke, H.L. Detection of flooded urban areas in high resolution synthetic aperture radar images using double scattering. Int. J. Appl. Earth Obs. 2014, 28, 150–159. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.R.; Thakur, P.K. Detecting, mapping and analysing of flood water propagation using synthetic aperture radar (SAR) satellite data and GIS: A case study from the Kendrapara district of Orissa state of India. Egypt. J. Remote Sens. Space Sci. 2018, 21, 37–41. [Google Scholar] [CrossRef]
- Cian, F.; Marconcini, M.; Ceccato, P. Normalized Difference Flood Index for rapid flood mapping: Taking advantage of EO big data. Remote Sens. Environ. 2018, 209, 712–730. [Google Scholar] [CrossRef]
- Lacomme, P.; Marchais, J.C.; Hardange, J.P.; Normant, E. Air and Spaceborne Radar Systems: An Introduction; SciTech Publishing: Raleigh, NC, USA; William Andrew Publishing: Norwich, NY, USA, 2001; Volume 108, p. 684. [Google Scholar]
- Cohen, J.; Riihimäki, H.; Pulliainen, J.; Lemmetyinen, J.; Heilimo, J. Implications of boreal forest stand characteristics for X-band SAR flood mapping accuracy. Remote Sens. Environ. 2016, 186, 47–63. [Google Scholar] [CrossRef]
- Mason, D.C.; Trigg, M.; Garcia-Pintado, J.; Cloke, H.L.; Neal, J.C.; Bates, P.D. Improving the TanDEM-X digital elevation model for flood modelling using flood extents from synthetic aperture radar images. Remote Sens. Environ. 2016, 173, 15–28. [Google Scholar] [CrossRef] [Green Version]
- Teng, J.; Jakeman, A.J.; Vaze, J.; Croke, B.F.; Dutta, D.; Kim, S. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environ. Model. Softw. 2017, 90, 201–216. [Google Scholar] [CrossRef]
- Rahman, M.; Ningsheng, C.; Islam, M.M.; Dewan, A.; Iqbal, J.; Washakh, R.M.A.; Shufeng, T. Flood Susceptibility Assessment in Bangladesh Using Machine Learning and Multi-criteria Decision Analysis. Earth Syst Environ. 2019, 3, 585–601. [Google Scholar]
- Nguyen, H.Q.; Degener, J.; Kappas, M. Flash flood prediction by coupling KINEROS2 and HEC-RAS models for tropical regions of Northern Vietnam. Hydrology 2015, 17, 242–265. [Google Scholar] [CrossRef] [Green Version]
- Hayat, H.; Akbar, T.A.; Tahir, A.A.; Hassan, Q.K.; Dewan, A.; Irshad, M. Simulating Current and Future River-Flows in the Karakoram and Himalayan Regions of Pakistan Using Snowmelt-Runoff Model and RCP Scenarios. Water 2019, 11, 761. [Google Scholar]
- Tran, T.; James, H. Transformation of household livelihoods in adapting to the impacts of flood control schemes in the Vietnamese Mekong Delta. Water Resour. Rural. Dev. 2017, 9, 67–80. [Google Scholar] [CrossRef]
- Räsänen, T.A.; Someth, P.; Lauri, H.; Koponen, J.; Sarkkula, J.; Kummu, M. Observed river discharge changes due to hydropower operations in the Upper Mekong Basin. J. Hydrol. 2017, 545, 28–41. [Google Scholar] [CrossRef]
- Ha, T.P.; Dieperink, C.; Otter, H.S.; Hoekstra, P. Governance conditions for adaptive freshwater management in the Vietnamese Mekong Delta. J. Hydrol. 2018, 557, 116–127. [Google Scholar] [CrossRef]
- Lauri, H.; Moel, H.D.; Ward, P.J.; Räsänen, T.A.; Keskinen, M.; Kummu, M.S. Future changes in Mekong River hydrology: Impact of climate change and reservoir operation on discharge. Hydrol. Earth Syst. Sci. 2012, 16, 4603–4619. [Google Scholar] [CrossRef]
- Kingston, D.G.; Thompson, J.R.; Kite, G. Uncertainty in climate change projections of discharge for the Mekong River Basin. Hydrol. Earth Syst. Sci. 2011, 15, 1459–1471. [Google Scholar] [CrossRef] [Green Version]
- Quang, N.H. Modelling Soil Erosion, Flash Flood Prediction and Evapotranspiration in Northern Vietnam. Ph.D. Thesis, Georg-August Universität Göttingen, Göttingen, Germany, February 2016. [Google Scholar]
- Schumann, G.; Di Baldassarre, G.; Alsdorf, D.; Bates, P.D. Near real-time flood wave approximation on large rivers from space: Application to the River Po, Italy. Water Resour. Res. 2010, 46, 1–8. [Google Scholar] [CrossRef]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffmann, L.; Savenije, H.H. Towards an automated SAR-based flood monitoring system: Lessons learned from two case studies. Phys. Chem. Earth Parts A/B/C 2011, 36, 241–252. [Google Scholar] [CrossRef]
- Mason, D.C.; Davenport, I.J.; Neal, J.C.; Schumann, G.J.; Bates, P.D. Near real-time flood detection in urban and rural areas using high-resolution synthetic aperture radar images. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3041–3052. [Google Scholar] [CrossRef] [Green Version]
- Townsend, P.A. Estimating forest structure in wetlands using multitemporal SAR. Remote Sens. Environ. 2002, 79, 288–2304. [Google Scholar] [CrossRef]
- Tuan, L.A.; Hoanh, C.T.; Miller, F.; Sinh, B.T. Floods and salinity management in the mekong delta, vietnam. challenges to sustainable development in the mekong delta. Reg. Natl. Policy Issues Res. Needs 2008, 1, 18–68. [Google Scholar]
- Mekong River Commission (MRC). State of the Basin Report. Vientiane, Lao PDR; MRC: Phnom Penh, Cambodia, 2010; p. 232. [Google Scholar]
- Brunier, G.; Anthony, E.J.; Goichot, M.; Provansal, M.; Dussouillez, P. Recent morphological changes in the Mekong and Bassac river channels, Mekong delta: The marked impact of river-bed mining and implications for delta destabilisation. Geomorphology 2014, 224, 177–191. [Google Scholar] [CrossRef]
- Kite, G. Modelling the Mekong: Hydrological simulation for environmental impact studies. J. Hydrol. 2001, 253, 1–13. [Google Scholar] [CrossRef]
- Hoanh, C.T.; Suhardiman, D.; Anh, L.T. Irrigation development in the Vietnamese Mekong Delta: Towards polycentric water governance? Int. J. Water Gov. 2014, 2, 61–82. [Google Scholar] [CrossRef] [Green Version]
- Grill, G.; Dallaire, C.O.; Chouinard, E.F.; Sindorf, N.; Lehner, B. Development of new indicators to evaluate river fragmentation and flow regulation at large scales: A case study for the Mekong River Basin. Ecol. Indic. 2014, 45, 148–159. [Google Scholar] [CrossRef]
- Fan, H.; He, D.; Wang, H. Environmental consequences of damming the mainstream Lancang-Mekong River: A review. Earth Sci. Rev. 2015, 146, 77–91. [Google Scholar] [CrossRef]
- Darby, S.E.; Hackney, C.R.; Leyland, J.; Kummu, M.; Lauri, H.; Parsons, D.R.; Best, J.L.; Nicholas, A.P.; Aalto, R. Fluvial sediment supply to a mega-delta reduced by shifting tropical-cyclone activity. Nature 2016, 539, 276. [Google Scholar] [CrossRef] [Green Version]
- Pham, N.T.; Nguyen, Q.H.; Ngo, A.D.; Le, H.T.; Nguyen, C.T. Investigating the impacts of typhoon-induced floods on the agriculture in the central region of Vietnam by using hydrological models and satellite data. Nat. Hazards 2018, 92, 189–204. [Google Scholar] [CrossRef]
- Brunner, G.W. HEC-RAS, river analysis system hydraulic reference manual. In Hydrological Engineering Center; US Army Corps of Engineers: Washington, DC, USA; Davis, CA, USA, 2010; Version 4, 1 January 2010 (Approved for Public Release. Distribution Unlimited. CPD-69). [Google Scholar]
- Rodriguez, L.B.; Cello, P.A.; Vionnet, C.A.; Goodrich, D. Fully conservative coupling of HEC-RAS with MODFLOW to simulate stream–aquifer interactions in a drainage basin. J. Hydrol. 2008, 353, 129–142. [Google Scholar] [CrossRef]
- Horritt, M.S.; Bates, P.D. Evaluation of 1D and 2D numerical models for predicting river flood inundation. J. Hydrol. 2002, 268, 87–99. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Schreier, G. SAR Geocoding: Data and Systems; Wichmann: Kalsruhe, Germany, 1993. [Google Scholar]
- Arnesen, A.S.; Silva, T.S.; Hess, L.L.; Novo, E.M.; Rudorff, C.M.; Chapman, B.D.; McDonald, K.C. Monitoring flood extent in the lower Amazon River floodplain using ALOS/PALSAR ScanSAR images. Remote Sens. Environ. 2013, 130, 51–61. [Google Scholar] [CrossRef]
- Engman, E.T. Roughness coefficients for routing surface runoff. J. Irrig. Drain. Eng. 1986, 112, 39–53. [Google Scholar] [CrossRef]
- Bunya, S.; Dietrich, J.C.; Westerink, J.J.; Ebersole, B.A.; Smith, J.M.; Atkinson, J.H.; Jensen, R.; Resio, D.T.; Luettich, R.A.; Dawson, C.; et al. A high-resolution coupled riverine flow, tide, wind, wind wave, and storm surge model for southern Louisiana and Mississippi. Part I: Model development and validation. Mon. Weather. Rev. 2010, 138, 345–377. [Google Scholar] [CrossRef] [Green Version]
- Barnes, H.H. Roughness characteristics of natural channels. In Geological Survey Water Supply; US Government Printing Office: Washington, DC, USA, 1967; Volume 1849, p. 213. [Google Scholar]
- Moriasi, D.N.; Arnold, J.G.; VanLiew, M.W.; Bingner, R.L.; Harmel, R.D.; Veith, T.L. Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans. ASABE 2007, 50, 885–900. [Google Scholar] [CrossRef]
- Santhi, C.; Arnold, J.G.; Williams, J.R.; Dugas, W.A.; Srinivasan, R.; Hauck, L.M. Validation of the swat model on a large rwer basin with point and nonpoint sources 1. J. Am. Water Resour. Assoc. 2001, 37, 1169–1188. [Google Scholar] [CrossRef]
- Uddin, K.; Matin, M.A.; Meyer, F.J. Operational flood mapping using multi-temporal sentinel-1 SAR images: A case study from Bangladesh. Remote Sens. 2019, 11, 1581. [Google Scholar] [CrossRef] [Green Version]
- Amitrano, D.; Di Martino, G.; Iodice, A.; Riccio, D.; Ruello, G. Unsupervised rapid flood mapping using Sentinel-1 GRD SAR images. IEEE Trans. Geosci. Remote. 2018, 56, 3290–3299. [Google Scholar] [CrossRef]
- Prestininzi, P.; Di Baldassarre, G.; Schumann, G.; Bates, P.D. Selecting the appropriate hydraulic model structure using low-resolution satellite imagery. Adv. Water Resour. 2011, 34, 38–46. [Google Scholar] [CrossRef]
- Martinis, S.; Kersten, J.; Twele, A. A fully automated TerraSAR-X based flood service. ISPRS J. Photogramm. Remote Sens. 2015, 104, 203–212. [Google Scholar] [CrossRef]
- Giustarini, L.; Vernieuwe, H.; Verwaeren, J.; Chini, M.; Hostache, R.; Matgen, P.; Verhoest, N.E.; De Baets, B. Accounting for image uncertainty in SAR-based flood mapping. Int. J. Appl. Earth Obs. 2015, 34, 70–77. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Land use/land cover (LULC) | Default N | Calibrated N |
|---|---|---|
| 2-season rice | 0.060 | 0.015 |
| 3-season rice | 0.060 | 0.380 |
| Aquaculture ponds | 0.045 | 0.076 |
| Fruit trees | 0.400 | 0.750 |
| Mangroves | 0.035 | 0.037 |
| Residence | 0.068 | 0.760 |
| River and channel | 0.035 | 0.040 |
| Road | 0.032 | 0.780 |
| Wet grass | 0.035 | 0.045 |
| Sensor Band Imaging Mode | Pass Polarization | Date of Acquisition | Incidence Angle | Status | Ground Resolution ¥ |
|---|---|---|---|---|---|
| Setinel-1 C IW | Descending VV VH | 2014/10/18 2015/02/03 | 30.86–45.99 30.86–45.99 | Flood Ref. Ʈ | 10 m |
| ALOS2 L SGI | Ascending HH HV | 2015/10/23 | 40.29 * | Flood Ref. (Ʈ) | 25 m |
| TerraSAR-X X ScanSAR | Descending HH | 2010/11/04 | 31.8–40.5 | Flood Ref. (HEC) | 8.25 m |
| RardarSAT-2 C Wide Fine | Ascending VV VH | 2016/10/30 2016/05/14 | 30.6–39.5 30.6–39.5 | Flood Ref. | 5.2 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong Quang, N.; Tuan, V.A.; Thi Thu Hang, L.; Manh Hung, N.; Thi The, D.; Thi Dieu, D.; Duc Anh, N.; Hackney, C.R. Hydrological/Hydraulic Modeling-Based Thresholding of Multi SAR Remote Sensing Data for Flood Monitoring in Regions of the Vietnamese Lower Mekong River Basin. Water 2020, 12, 71. https://doi.org/10.3390/w12010071
Hong Quang N, Tuan VA, Thi Thu Hang L, Manh Hung N, Thi The D, Thi Dieu D, Duc Anh N, Hackney CR. Hydrological/Hydraulic Modeling-Based Thresholding of Multi SAR Remote Sensing Data for Flood Monitoring in Regions of the Vietnamese Lower Mekong River Basin. Water. 2020; 12(1):71. https://doi.org/10.3390/w12010071
Chicago/Turabian StyleHong Quang, Nguyen, Vu Anh Tuan, Le Thi Thu Hang, Nguyen Manh Hung, Doan Thi The, Dinh Thi Dieu, Ngo Duc Anh, and Christopher R. Hackney. 2020. "Hydrological/Hydraulic Modeling-Based Thresholding of Multi SAR Remote Sensing Data for Flood Monitoring in Regions of the Vietnamese Lower Mekong River Basin" Water 12, no. 1: 71. https://doi.org/10.3390/w12010071