
Assessing Suitability of Auto-Selection of Hot and Cold Anchor Pixels of the UAS-METRIC Model for Developing Crop Water Use Maps
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Sites
2.2. Aerial Imaging Campaigns
2.3. Aerial Imagery Preprocessing
2.4. UAS-METRIC
2.5. Thermal Canopy
2.6. Feature Extraction
2.7. Soil Water Content
2.8. Stomatal Conductance of the Leaf
2.9. Evapotranspiration Based on a Basal Crop Coefficient
2.10. Statistical Analysis
3. Results
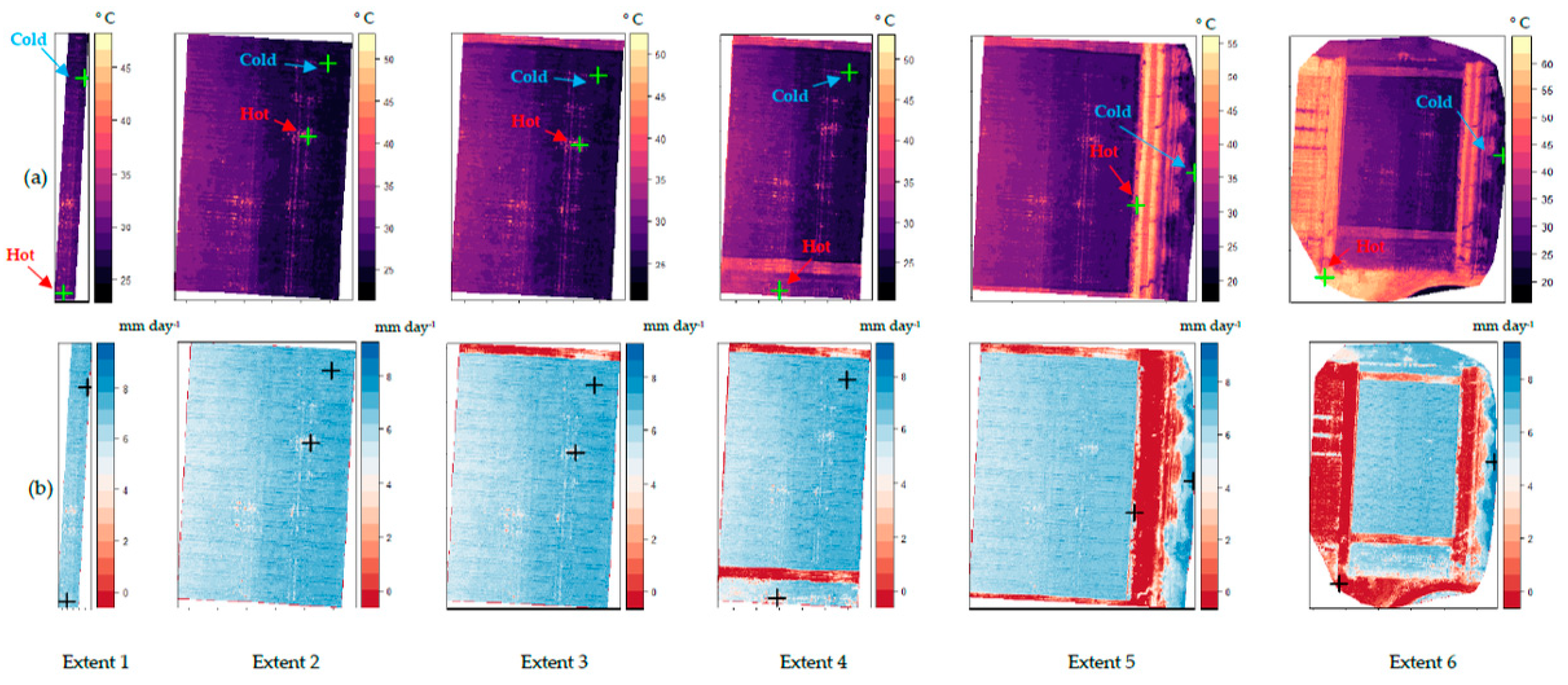
3.1. Hot and Cold Anchors
3.2. Daily ETc Estimation from Different Extents
3.3. Canopy Temperature and Stomatal Conductance
4. Discussion
5. Conclusions
- If the composite image is limited to a field with full crop cover and without visible pixels of a bare soil, the model cannot find hot anchor pixels, and it fails to generate a map of crop evapotranspiration.
- The limits of the image size and the conditions of the crop and soil within the image affects the measured temperature of the hot and cold pixel reference conditions, and this results in different ET estimation outputs for the model. A field could be uniformly water-stressed or uniformly wet, for example, and a relevant fully irrigated cold pixel or hot (dry bare soil) pixel would not be available within the image.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mokhtari, A.; Ahmadi, A.; Daccache, A.; Drechsler, K. Actual Evapotranspiration from UAV Images: A Multi-Sensor Data Fusion Approach. Remote Sens. 2021, 13, 2315. [Google Scholar] [CrossRef]
- Zhang, H.; Yemoto, K. UAS-based remote sensing applications on the Northern Colorado Limited Irrigation Research Farm. Int. J. Precis. Agric. Aviat. 2019, 2, 1–10. [Google Scholar] [CrossRef]
- Barker, J.B.; Bhatti, S.; Heeren, D.M.; Neale, C.M.U.; Rudnick, D.R. Variable Rate Irrigation of Maize and Soybean in West-Central Nebraska Under Full and Deficit Irrigation. Front. Big Data 2019, 2. Available online: https://www.frontiersin.org/article/10.3389/fdata.2019.00034 (accessed on 13 January 2022).
- Chandel, A.; Khot, L.; Molaei, B.; Peters, R.; Stöckle, C.; Jacoby, P. High-Resolution Spatiotemporal Water Use Mapping of Surface and Direct-Root-Zone Drip-Irrigated Grapevines Using UAS-Based Thermal and Multispectral Remote Sensing. Remote Sens. 2021, 13, 954. [Google Scholar] [CrossRef]
- Chávez, J.L.; Torres-Rua, A.F.; Woldt, W.E.; Zhang, H.; Robertson, C.C.; Marek, G.W.; Wang, D.; Heeren, D.M.; Taghvaeian, S.; Neale, C.M. A Decade of Unmanned Aerial Systems in Irrigated Agriculture in the Western U.S. Appl. Eng. Agric. 2020, 36, 423–436. [Google Scholar] [CrossRef]
- Federico, G.O.; Ortega-Farías, S.; de la Fuente-Sáiz, D.; Fonseca, D.L.; Fuentes-Peñailillo, F. Water: Tools and Functions to Estimate Actual Evapotranspiration Using Land Surface Energy Balance Models in R. R J. 2016, 8, 352. [Google Scholar] [CrossRef]
- Chandel, A.K.; Molaei, B.; Khot, L.R.; Peters, R.T.; Stöckle, C.O. High Resolution Geospatial Evapotranspiration Mapping of Irrigated Field Crops Using Multispectral and Thermal Infrared Imagery with METRIC Energy Balance Model. Drones 2020, 4, 52. [Google Scholar] [CrossRef]
- Allen, R.G.; Tasumi, M.; Trezza, R. Satellite-Based Energy Balance for Mapping Evapotranspiration with Internalized Calibration (METRIC)—Model. J. Irrig. Drain. Eng. 2007, 133, 380–394. [Google Scholar] [CrossRef]
- Allen, R.G.; Tasumi, M.; Morse, A.; Trezza, R.; Wright, J.L.; Bastiaanssen, W.; Kramber, W.; Lorite, I.; Robison, C.W. Satellite-Based Energy Balance for Mapping Evapotranspiration with Internalized Calibration (METRIC)—Applications. J. Irrig. Drain. Eng. 2007, 133, 395–406. [Google Scholar] [CrossRef]
- Allen, R.G.; Burnett, B.; Kramber, W.; Huntington, J.; Kjaersgaard, J.; Kilic, A.; Kelly, C.; Trezza, R. Automated Calibration of the METRIC-Landsat Evapotranspiration Process. JAWRA J. Am. Water Resour. Assoc. 2013, 49, 563–576. [Google Scholar] [CrossRef]
- Mitchell, A.R.; Farris, N.A. Peppermint Response to Nitrogen Fertilizer in Central Oregon; Central Oregon Agricultural Research and Extension Center (COARC): Madras, OR, USA, 1994. [Google Scholar]
- Allen, R.G.; Walter, I.A.; Elliott, R.L.; Howell, T.A.; Itenfisu, D.; Jensen, M.E. The ASCE Standardized Reference Evapotranspiration Equation; American Society of Civil Engineers: Reston, VI, USA, 2005. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-based crop and weed classification for smart farming. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3024–3031. [Google Scholar]
- Chakraborty, M.; Khot, L.R.; Peters, R.T. Assessing suitability of modified center pivot irrigation systems in corn production using low altitude aerial imaging techniques. Inf. Process. Agric. 2019, 7, 41–49. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration—Guidelines for Computing Crop Water Requirements—FAO Irrigation and Drainage Paper 56 Summary; FAO: Québec City, QC, Canada, 1998; p. 15.
- Use of Calibrated Reflectance Panels For MicaSense Data. MicaSense Knowledge Base. Available online: https://support.micasense.com/hc/en-us/articles/115000765514-Use-of-Calibrated-Reflectance-Panels-For-MicaSense-Data (accessed on 3 April 2022).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Extents | Anchors (Pixel) | Ts (°C) | Location of Pixels | Pixel LAI | Pixel NDVI | a | b | |
|---|---|---|---|---|---|---|---|---|
| 3 August 2021 | Extent 1 | Hot | 41.6 | Soil within B5-75% ETc | 0.28 | 0.33 | 0.29 | 87.68 |
| Cold | 27.2 | Spearmint within B1-75% ETc | 5.33 | 0.81 | ||||
| Extent 2 | Hot | 41.5 | Soil within B4-75% ETc | 0.17 | 0.28 | 0.24 | 69.80 | |
| Cold | 24.0 | Spearmint within B2-125% ETc | 5.34 | 0.81 | ||||
| Extent 3 | Hot | 40.2 | Soil within B4-75% ETc | 0.06 | 0.20 | 0.25 | 72.61 | |
| Cold | 24.0 | Spearmint within B2-125% ETc | 5.34 | 0.81 | ||||
| Extent 4 | Hot | 43.3 | Soil at the 75% ETc near grass | 0.16 | 0.28 | 0.22 | 63.23 | |
| Cold | 24.0 | Spearmint within B2-125% ETc | 5.34 | 0.81 | ||||
| Extent 5 | Hot | 51.1 | Non-irrigated soil outside the field | 0.16 | 0.28 | 0.14 | 39.48 | |
| Cold | 20.8 | Canopy of trees at eastern side | 5.90 | 0.84 | ||||
| Extent 6 | Hot | 59.8 | Non-irrigated soil outside the field | 0.06 | 0.20 | 0.10 | 27.38 | |
| Cold | 21.8 | Canopy of trees at eastern side | 5.91 | 0.84 | ||||
| 26 August 2021 | Extent 1 | Hot | Automatic Selection of hot anchors FAILED | |||||
| Cold | ||||||||
| Extent 2 | Hot | 28.73 | Soil within B4-75% ETc | 0.58 | 0.41 | 0.34 | −96.32 | |
| Cold | 22.13 | Spearmint within B2-125% ETc | 5.42 | 0.81 | ||||
| Extent 3 | Hot | 36.89 | Soil irrigated at the 125% rate | 0.10 | 0.24 | 0.13 | −34.63 | |
| Cold | 22.13 | Spearmint within B2-125% ETc | 5.42 | 0.81 | ||||
| Extent 4 | Hot | 37.13 | Soil irrigated at the 75% rate | 0.08 | 0.23 | 0.13 | −34.08 | |
| Cold | 22.13 | Spearmint within B2-125% ETc | 5.42 | 0.81 | ||||
| Extent 5 | Hot | 42.76 | Non-irrigated soil outside the field | 0.10 | 0.24 | 0.08 | −21.72 | |
| Cold | 22.11 | Trees canopy at eastern side | 5.30 | 0.81 | ||||
| Extent 6 | Hot | 43.93 | Non-irrigated soil outside the field | 0.08 | 0.22 | 0.07 | −16.79 | |
| Cold | 20.61 | Plants at the edge of the canal | 5.49 | 0.83 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molaei, B.; Peters, R.T.; Khot, L.R.; Stöckle, C.O. Assessing Suitability of Auto-Selection of Hot and Cold Anchor Pixels of the UAS-METRIC Model for Developing Crop Water Use Maps. Remote Sens. 2022, 14, 4454. https://doi.org/10.3390/rs14184454
Molaei B, Peters RT, Khot LR, Stöckle CO. Assessing Suitability of Auto-Selection of Hot and Cold Anchor Pixels of the UAS-METRIC Model for Developing Crop Water Use Maps. Remote Sensing. 2022; 14(18):4454. https://doi.org/10.3390/rs14184454
Chicago/Turabian StyleMolaei, Behnaz, R. Troy Peters, Lav R. Khot, and Claudio O. Stöckle. 2022. "Assessing Suitability of Auto-Selection of Hot and Cold Anchor Pixels of the UAS-METRIC Model for Developing Crop Water Use Maps" Remote Sensing 14, no. 18: 4454. https://doi.org/10.3390/rs14184454